 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D printed cable-driven continuum robots with generally routed cables: modeling and experiments
Mar 10, 2020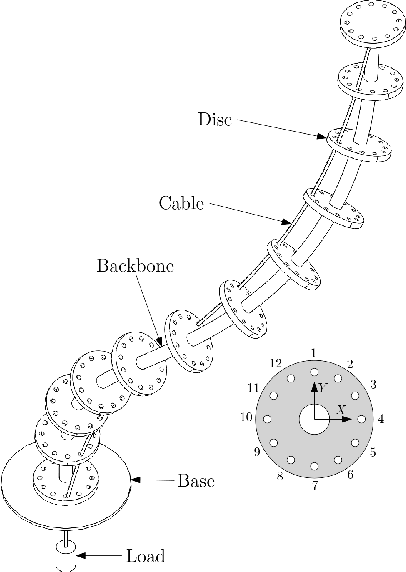
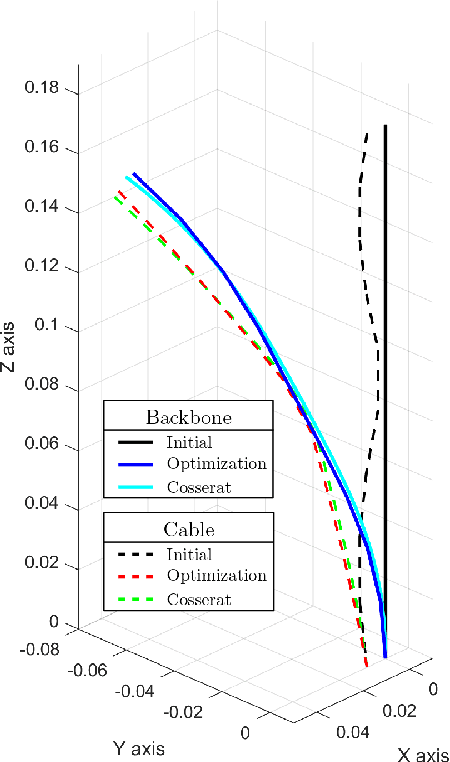
Continuum robots are becoming increasingly popular for applications which require the robots to deform and change shape, while also being compliant. A cable-driven continuum robot is one of the most commonly used type. Typical cable driven continuum robots consist of a flexible backbone with spacer disks attached to the backbone and cables passing through the holes in the spacer disks from the fixed base to a free end. In most such robots, the routing of the cables are straight or a smooth helical curve. In this paper, we analyze the experimental and theoretical deformations of a 3D printed continuum robot, for 6 different kinds of cable routings. The results are compared for discrete optimization based kinematic modelling as well as static modelling using Cosserat rod theory. It is shown that the experimental results match the theoretical results with an error margin of 2%. It is also shown that the optimization based approach is faster than the one based on Cosserat rod theory. We also present a three-fingered gripper prototype where each of the fingers are 3D printed continuum robots with general cable routing. It is demonstrated that the prototype can be used for gripping objects and for its manipulation.