 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToward Robotically Automated Femoral Vascular Access
Jul 06, 2021

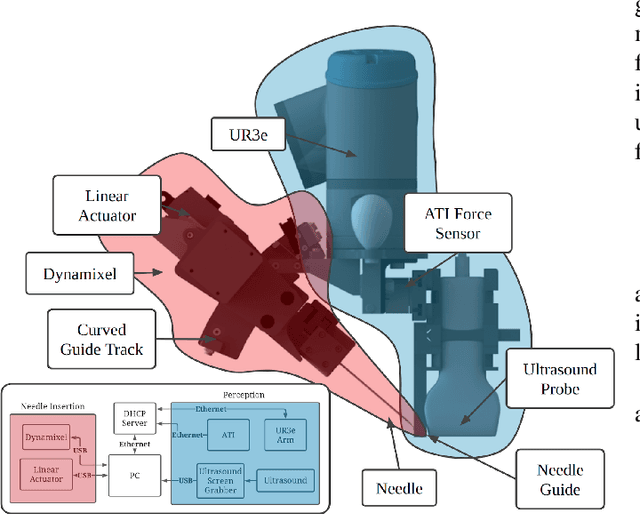
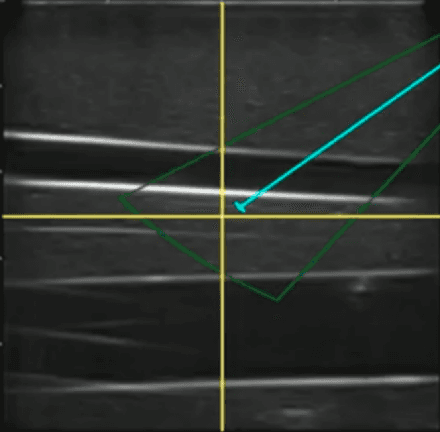
Advanced resuscitative technologies, such as Extra Corporeal Membrane Oxygenation (ECMO) cannulation or Resuscitative Endovascular Balloon Occlusion of the Aorta (REBOA), are technically difficult even for skilled medical personnel. This paper describes the core technologies that comprise a teleoperated system capable of granting femoral vascular access, which is an important step in both of these procedures and a major roadblock in their wider use in the field. These technologies include a kinematic manipulator, various sensing modalities, and a user interface. In addition, we evaluate our system on a surgical phantom as well as in-vivo porcine experiments. These resulted in, to the best of our knowledge, the first robot-assisted arterial catheterizations; a major step towards our eventual goal of automatic catheter insertion through the Seldinger technique.
Learning Active Spine Behaviors for Dynamic and Efficient Locomotion in Quadruped Robots
May 16, 2019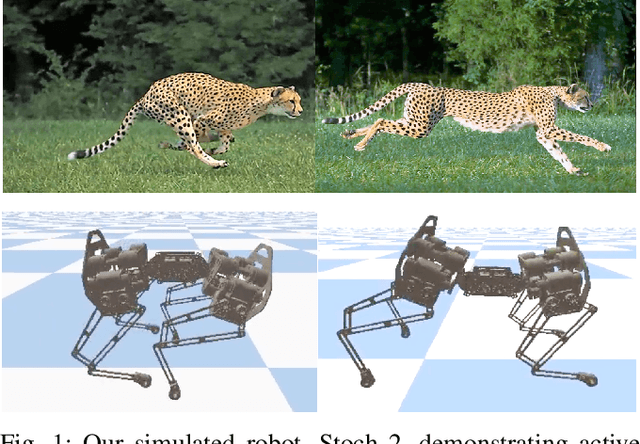
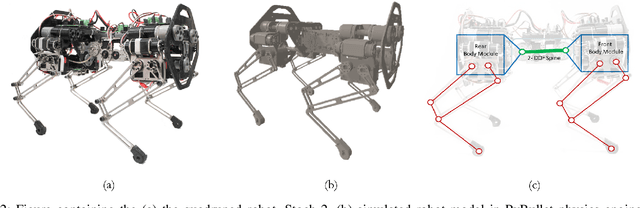
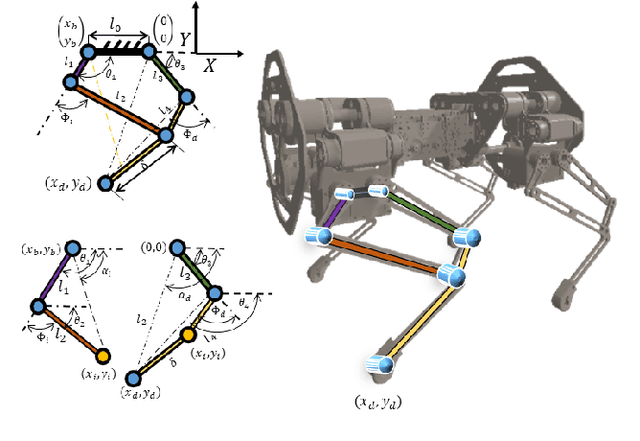
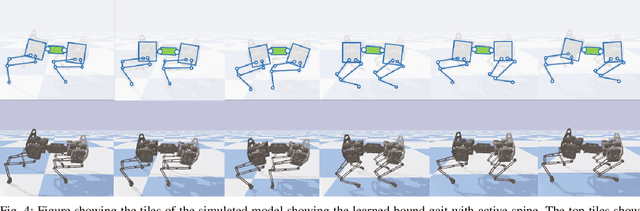
In this work, we provide a simulation framework to perform systematic studies on the effects of spinal joint compliance and actuation on bounding performance of a 16-DOF quadruped spined robot Stoch 2. Fast quadrupedal locomotion with active spine is an extremely hard problem, and involves a complex coordination between the various degrees of freedom. Therefore, past attempts at addressing this problem have not seen much success. Deep-Reinforcement Learning seems to be a promising approach, after its recent success in a variety of robot platforms, and the goal of this paper is to use this approach to realize the aforementioned behaviors. With this learning framework, the robot reached a bounding speed of 2.1 m/s with a maximum Froude number of 2. Simulation results also show that use of active spine, indeed, increased the stride length, improved the cost of transport, and also reduced the natural frequency to more realistic values.