 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBenchmarking Sim2Real Gap: High-fidelity Digital Twinning of Agile Manufacturing
Sep 16, 2024



As the manufacturing industry shifts from mass production to mass customization, there is a growing emphasis on adopting agile, resilient, and human-centric methodologies in line with the directives of Industry 5.0. Central to this transformation is the deployment of digital twins, a technology that digitally replicates manufacturing assets to enable enhanced process optimization, predictive maintenance, synthetic data generation, and accelerated customization and prototyping. This chapter delves into the technologies underpinning the creation of digital twins specifically tailored to agile manufacturing scenarios within the realm of robotic automation. It explores the transfer of trained policies and process optimizations from simulated settings to real-world applications through advanced techniques such as domain randomization, domain adaptation, curriculum learning, and model-based system identification. The chapter also examines various industrial manufacturing automation scenarios, including bin-picking, part inspection, and product assembly, under Sim2Real conditions. The performance of digital twin technologies in these scenarios is evaluated using practical metrics including data latency, adaptation rate, simulation fidelity among others reported, providing a comprehensive assessment of their efficacy and potential impact on modern manufacturing processes.
Collaborating for Success: Optimizing System Efficiency and Resilience Under Agile Industrial Settings
Sep 12, 2024
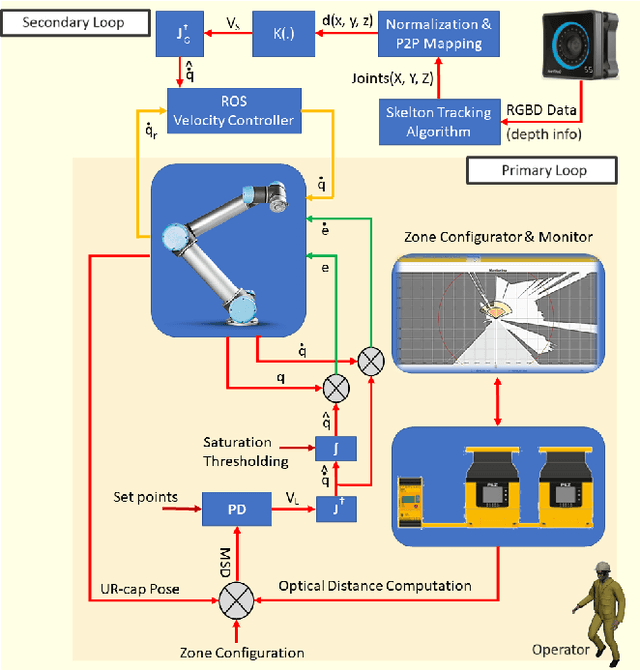
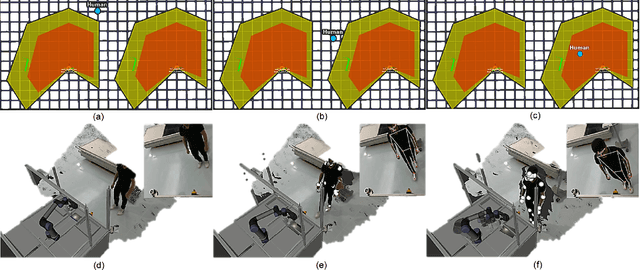

Designing an efficient and resilient human-robot collaboration strategy that not only upholds the safety and ergonomics of shared workspace but also enhances the performance and agility of collaborative setup presents significant challenges concerning environment perception and robot control. In this research, we introduce a novel approach for collaborative environment monitoring and robot motion regulation to address this multifaceted problem. Our study proposes novel computation and division of safety monitoring zones, adhering to ISO 13855 and TS 15066 standards, utilizing 2D lasers information. These zones are not only configured in the standard three-layer arrangement but are also expanded into two adjacent quadrants, thereby enhancing system uptime and preventing unnecessary deadlocks. Moreover, we also leverage 3D visual information to track dynamic human articulations and extended intrusions. Drawing upon the fused sensory data from 2D and 3D perceptual spaces, our proposed hierarchical controller stably regulates robot velocity, validated using Lasalle in-variance principle. Empirical evaluations demonstrate that our approach significantly reduces task execution time and system response delay, resulting in improved efficiency and resilience within collaborative settings.
Data-Link: High Fidelity Manufacturing Datasets for Model2Real Transfer under Industrial Settings
Jun 09, 2023

High-fidelity datasets play a pivotal role in imbuing simulators with realism, enabling the benchmarking of various state-of-the-art deep inference models. These models are particularly instrumental in tasks such as semantic segmentation, classification, and localization. This study showcases the efficacy of a customized manufacturing dataset comprising 60 classes in the creation of a high-fidelity digital twin of a robotic manipulation environment. By leveraging the concept of transfer learning, different 6D pose estimation models are trained within the simulated environment using domain randomization and subsequently tested on real-world objects to assess domain adaptation. To ascertain the effectiveness and realism of the created data-set, pose accuracy and mean absolute error (MAE) metrics are reported to quantify the model2real gap.
Learning Skills from Demonstrations: A Trend from Motion Primitives to Experience Abstraction
Oct 14, 2022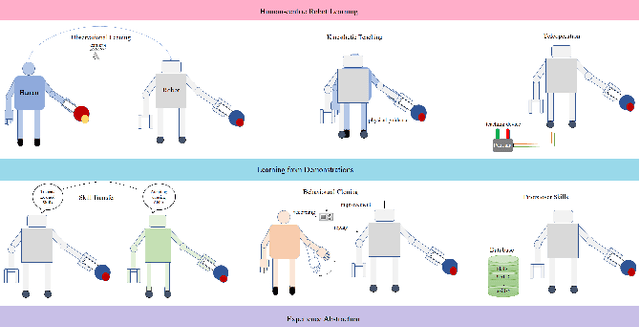
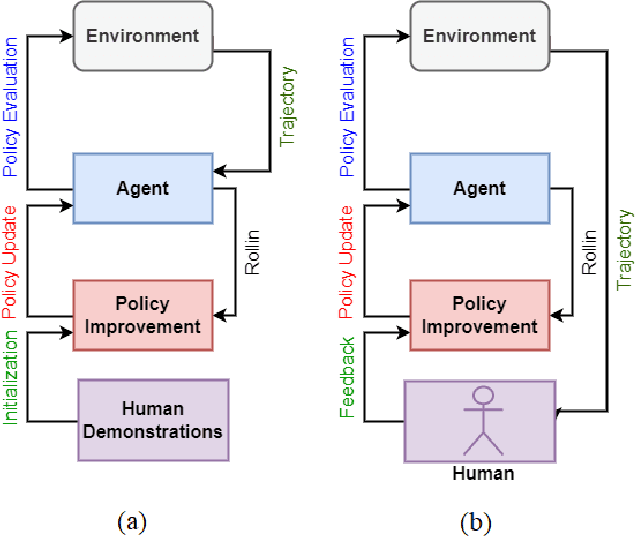
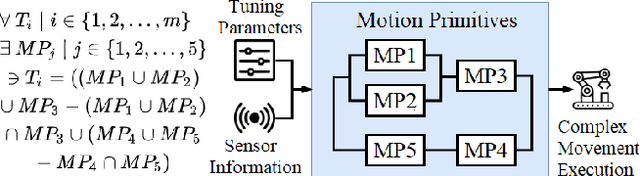

The uses of robots are changing from static environments in factories to encompass novel concepts such as Human-Robot Collaboration in unstructured settings. Pre-programming all the functionalities for robots becomes impractical, and hence, robots need to learn how to react to new events autonomously, just like humans. However, humans, unlike machines, are naturally skilled in responding to unexpected circumstances based on either experiences or observations. Hence, embedding such anthropoid behaviours into robots entails the development of neuro-cognitive models that emulate motor skills under a robot learning paradigm. Effective encoding of these skills is bound to the proper choice of tools and techniques. This paper studies different motion and behaviour learning methods ranging from Movement Primitives (MP) to Experience Abstraction (EA), applied to different robotic tasks. These methods are scrutinized and then experimentally benchmarked by reconstructing a standard pick-n-place task. Apart from providing a standard guideline for the selection of strategies and algorithms, this paper aims to draw a perspectives on their possible extensions and improvements
Fusing Visuo-Tactile Perception into Kernelized Synergies for Robust Grasping and Fine Manipulation of Non-rigid Objects
Sep 15, 2021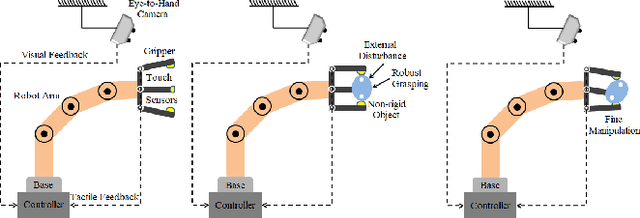
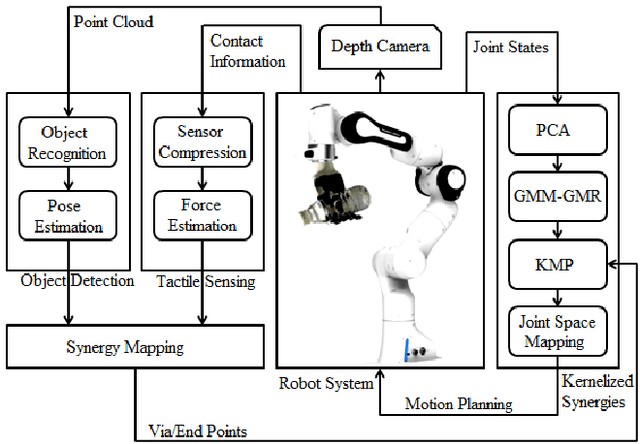
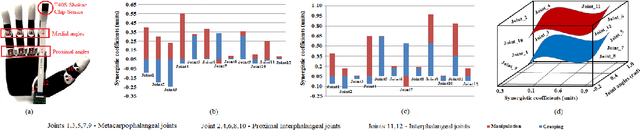
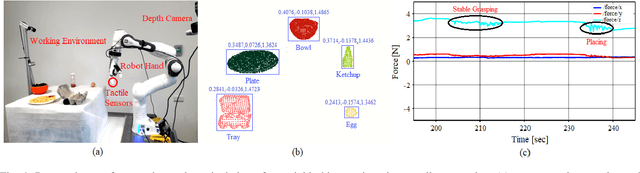
Handling non-rigid objects using robot hands necessities a framework that does not only incorporate human-level dexterity and cognition but also the multi-sensory information and system dynamics for robust and fine interactions. In this research, our previously developed kernelized synergies framework, inspired from human behaviour on reusing same subspace for grasping and manipulation, is augmented with visuo-tactile perception for autonomous and flexible adaptation to unknown objects. To detect objects and estimate their poses, a simplified visual pipeline using RANSAC algorithm with Euclidean clustering and SVM classifier is exploited. To modulate interaction efforts while grasping and manipulating non-rigid objects, the tactile feedback using T40S shokac chip sensor, generating 3D force information, is incorporated. Moreover, different kernel functions are examined in the kernelized synergies framework, to evaluate its performance and potential against task reproducibility, execution, generalization and synergistic re-usability. Experiments performed with robot arm-hand system validates the capability and usability of upgraded framework on stably grasping and dexterously manipulating the non-rigid objects.
Formulating Intuitive Stack-of-Tasks with Visuo-Tactile Perception for Collaborative Human-Robot Fine Manipulation
Mar 09, 2021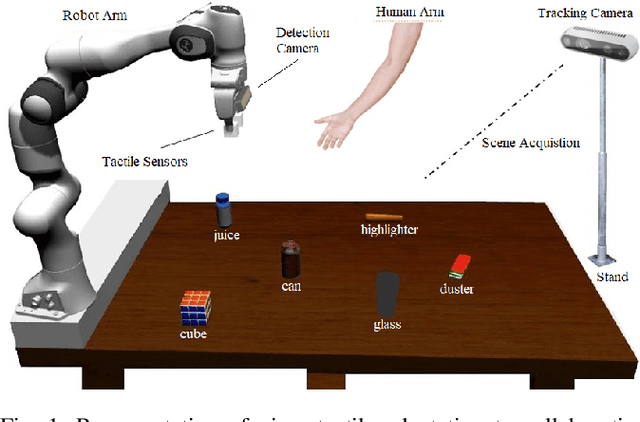
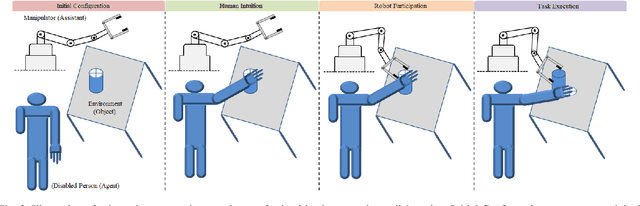
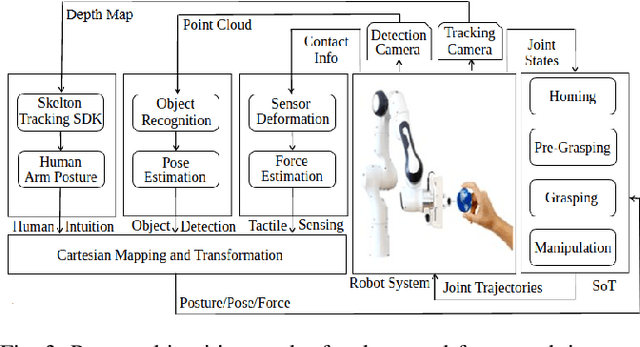
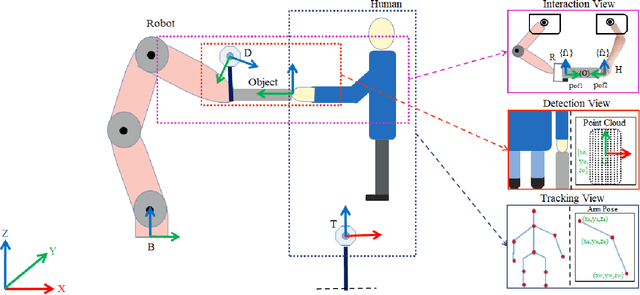
Enabling robots to work in close proximity with humans necessitates to employ not only multi-sensory information for coordinated and autonomous interactions but also a control framework that ensures adaptive and flexible collaborative behavior. Such a control framework needs to integrate accuracy and repeatability of robots with cognitive ability and adaptability of humans for co-manipulation. In this regard, an intuitive stack of tasks (iSOT) formulation is proposed, that defines the robots actions based on human ergonomics and task progress. The framework is augmented with visuo-tactile perception for flexible interaction and autonomous adaption. The visual information using depth cameras, monitors and estimates the object pose and human arm gesture while the tactile feedback provides exploration skills for maintaining the desired contact to avoid slippage. Experiments conducted on robot system with human partnership for assembly and disassembly tasks confirm the effectiveness and usability of proposed framework.
Vision Based Adaptation to Kernelized Synergies for Human Inspired Robotic Manipulation
Dec 13, 2020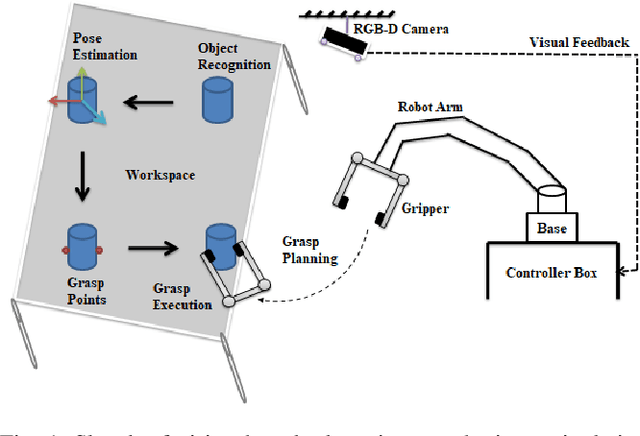
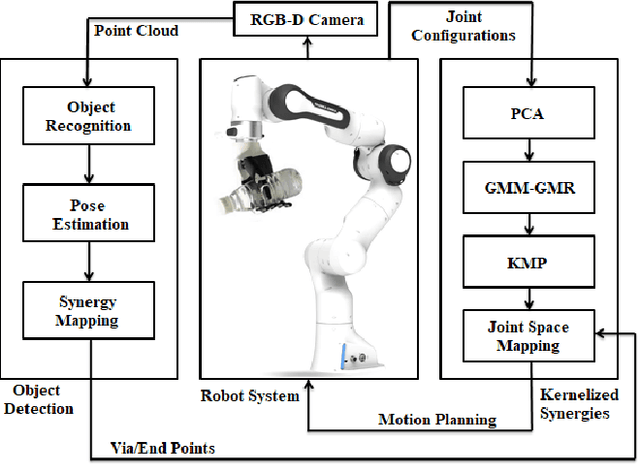

Humans in contrast to robots are excellent in performing fine manipulation tasks owing to their remarkable dexterity and sensorimotor organization. Enabling robots to acquire such capabilities, necessitates a framework that not only replicates the human behaviour but also integrates the multi-sensory information for autonomous object interaction. To address such limitations, this research proposes to augment the previously developed kernelized synergies framework with visual perception to automatically adapt to the unknown objects. The kernelized synergies, inspired from humans, retain the same reduced subspace for object grasping and manipulation. To detect object in the scene, a simplified perception pipeline is used that leverages the RANSAC algorithm with Euclidean clustering and SVM for object segmentation and recognition respectively. Further, the comparative analysis of kernelized synergies with other state of art approaches is made to confirm their flexibility and effectiveness on the robotic manipulation tasks. The experiments conducted on the robot hand confirm the robustness of modified kernelized synergies framework against the uncertainties related to the perception of environment.
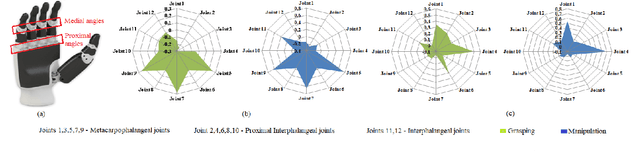
Leveraging Kernelized Synergies on Shared Subspace for Precision Grasp and Dexterous Manipulation
Sep 03, 2020

Manipulation in contrast to grasping is a trajectorial task that needs to use dexterous hands. Improving the dexterity of robot hands, increases the controller complexity and thus requires to use the concept of postural synergies. Inspired from postural synergies, this research proposes a new framework called kernelized synergies that focuses on the re-usability of the same subspace for precision grasping and dexterous manipulation. In this work, the computed subspace of postural synergies; parameterized by probabilistic movement primitives, is treated with kernel to preserve its grasping and manipulation characteristics and allows its reuse for new objects. The grasp stability of the proposed framework is assessed with a force closure quality index. For performance evaluation, the proposed framework is tested on two different simulated robot hand models using the Syngrasp toolbox and experimentally, four complex grasping and manipulation tasks are performed and reported. The results confirm the hand agnostic approach of the proposed framework and its generalization to distinct objects irrespective of their shape and size.
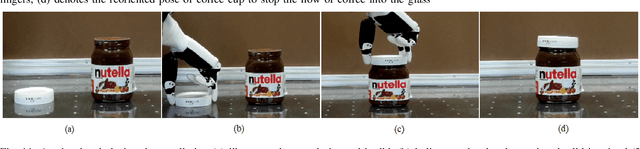
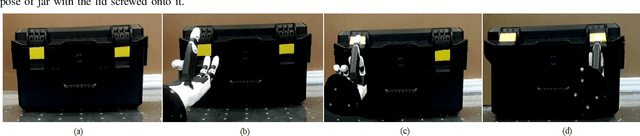
Reproducible Pruning System on Dynamic Natural Plants for Field Agricultural Robots
Aug 26, 2020
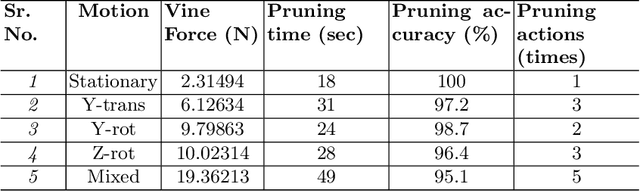
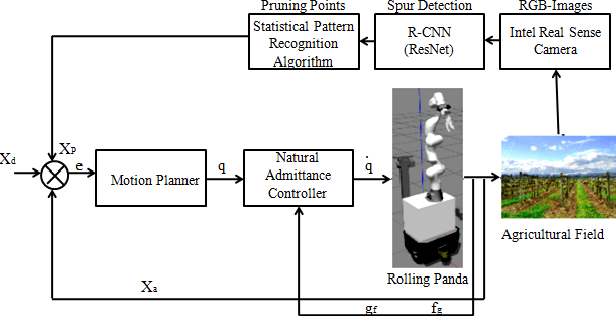
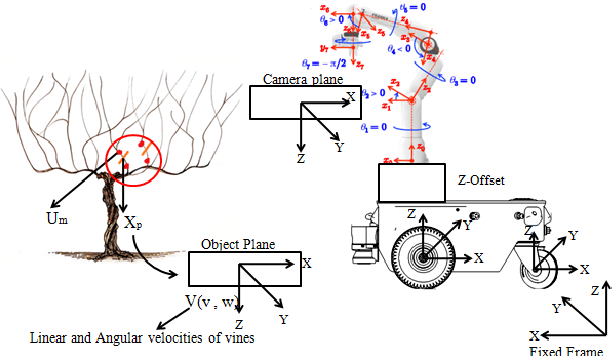
Pruning is the art of cutting unwanted and unhealthy plant branches and is one of the difficult tasks in the field robotics. It becomes even more complex when the plant branches are moving. Moreover, the reproducibility of robot pruning skills is another challenge to deal with due to the heterogeneous nature of vines in the vineyard. This research proposes a multi-modal framework to deal with the dynamic vines with the aim of sim2real skill transfer. The 3D models of vines are constructed in blender engine and rendered in simulated environment as a need for training the robot. The Natural Admittance Controller (NAC) is applied to deal with the dynamics of vines. It uses force feedback and compensates the friction effects while maintaining the passivity of system. The faster R-CNN is used to detect the spurs on the vines and then statistical pattern recognition algorithm using K-means clustering is applied to find the effective pruning points. The proposed framework is tested in simulated and real environments.
The Importance and the Limitations of Sim2Real for Robotic Manipulation in Precision Agriculture
Aug 10, 2020
In recent years Sim2Real approaches have brought great results to robotics. Techniques such as model-based learning or domain randomization can help overcome the gap between simulation and reality, but in some situations simulation accuracy is still needed. An example is agricultural robotics, which needs detailed simulations, both in terms of dynamics and visuals. However, simulation software is still not capable of such quality and accuracy. Current Sim2Real techniques are helpful in mitigating the problem, but for these specific tasks they are not enough.