 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVision Based Adaptation to Kernelized Synergies for Human Inspired Robotic Manipulation
Paper and Code
Dec 13, 2020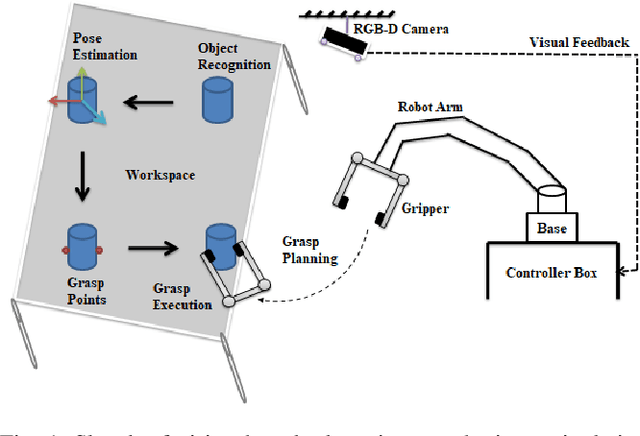
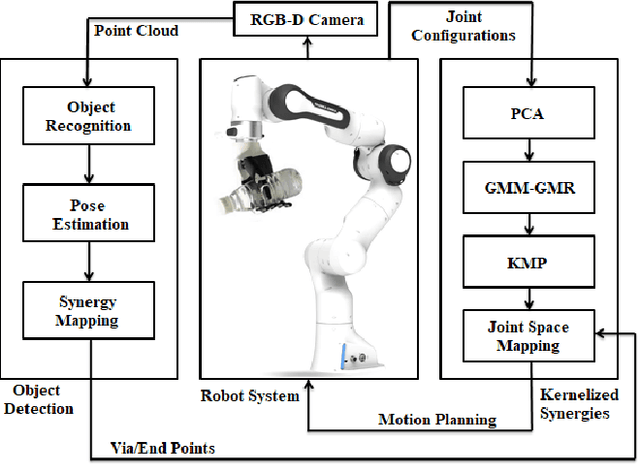

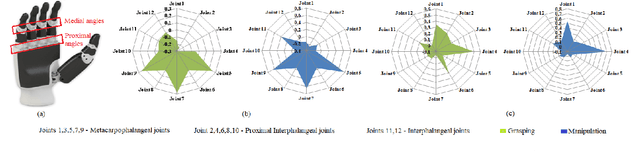
Humans in contrast to robots are excellent in performing fine manipulation tasks owing to their remarkable dexterity and sensorimotor organization. Enabling robots to acquire such capabilities, necessitates a framework that not only replicates the human behaviour but also integrates the multi-sensory information for autonomous object interaction. To address such limitations, this research proposes to augment the previously developed kernelized synergies framework with visual perception to automatically adapt to the unknown objects. The kernelized synergies, inspired from humans, retain the same reduced subspace for object grasping and manipulation. To detect object in the scene, a simplified perception pipeline is used that leverages the RANSAC algorithm with Euclidean clustering and SVM for object segmentation and recognition respectively. Further, the comparative analysis of kernelized synergies with other state of art approaches is made to confirm their flexibility and effectiveness on the robotic manipulation tasks. The experiments conducted on the robot hand confirm the robustness of modified kernelized synergies framework against the uncertainties related to the perception of environment.