 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReproducible Pruning System on Dynamic Natural Plants for Field Agricultural Robots
Paper and Code
Aug 26, 2020
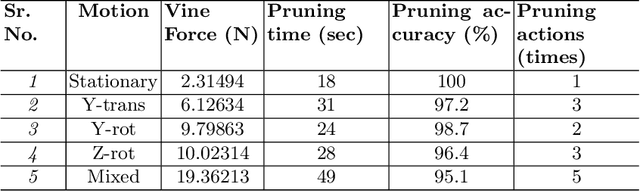
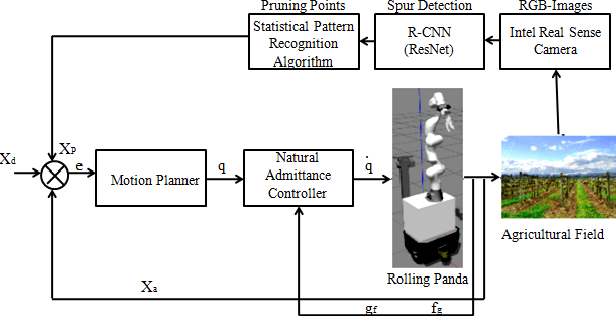
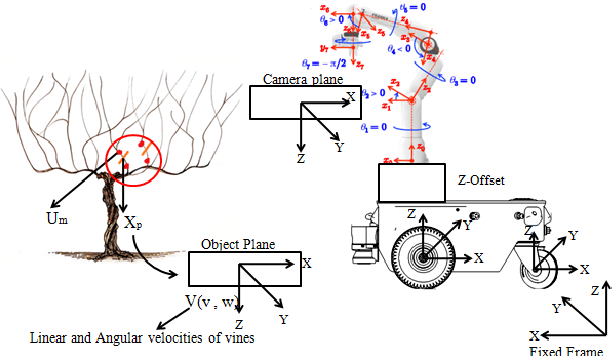
Pruning is the art of cutting unwanted and unhealthy plant branches and is one of the difficult tasks in the field robotics. It becomes even more complex when the plant branches are moving. Moreover, the reproducibility of robot pruning skills is another challenge to deal with due to the heterogeneous nature of vines in the vineyard. This research proposes a multi-modal framework to deal with the dynamic vines with the aim of sim2real skill transfer. The 3D models of vines are constructed in blender engine and rendered in simulated environment as a need for training the robot. The Natural Admittance Controller (NAC) is applied to deal with the dynamics of vines. It uses force feedback and compensates the friction effects while maintaining the passivity of system. The faster R-CNN is used to detect the spurs on the vines and then statistical pattern recognition algorithm using K-means clustering is applied to find the effective pruning points. The proposed framework is tested in simulated and real environments.