 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLeveraging Kernelized Synergies on Shared Subspace for Precision Grasp and Dexterous Manipulation
Paper and Code
Sep 03, 2020

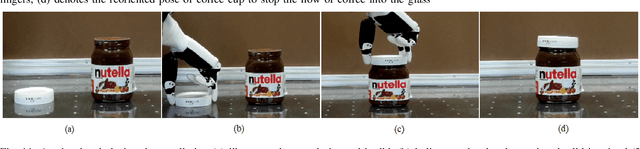
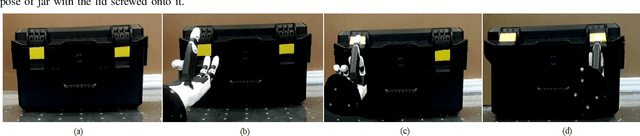
Manipulation in contrast to grasping is a trajectorial task that needs to use dexterous hands. Improving the dexterity of robot hands, increases the controller complexity and thus requires to use the concept of postural synergies. Inspired from postural synergies, this research proposes a new framework called kernelized synergies that focuses on the re-usability of the same subspace for precision grasping and dexterous manipulation. In this work, the computed subspace of postural synergies; parameterized by probabilistic movement primitives, is treated with kernel to preserve its grasping and manipulation characteristics and allows its reuse for new objects. The grasp stability of the proposed framework is assessed with a force closure quality index. For performance evaluation, the proposed framework is tested on two different simulated robot hand models using the Syngrasp toolbox and experimentally, four complex grasping and manipulation tasks are performed and reported. The results confirm the hand agnostic approach of the proposed framework and its generalization to distinct objects irrespective of their shape and size.