 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCreating a Segmented Pointcloud of Grapevines by Combining Multiple Viewpoints Through Visual Odometry
Aug 29, 2024


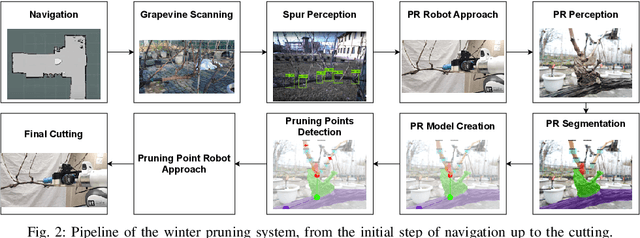
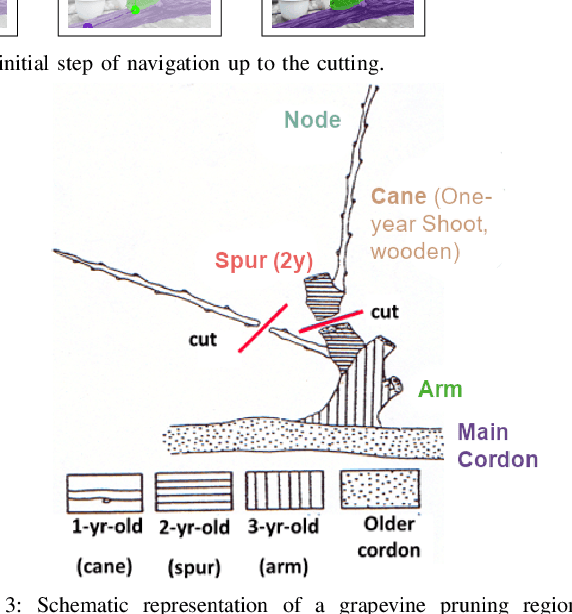
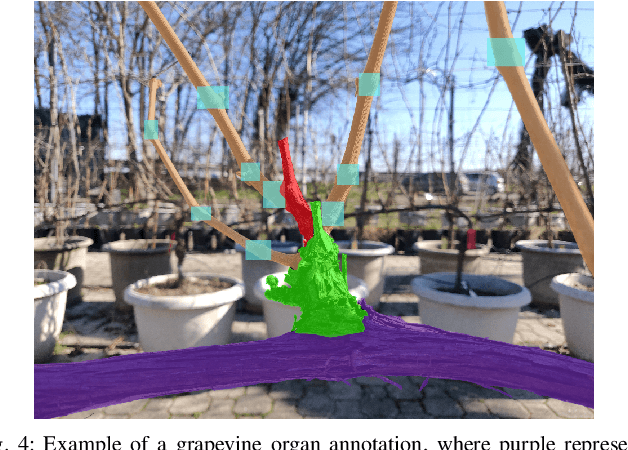
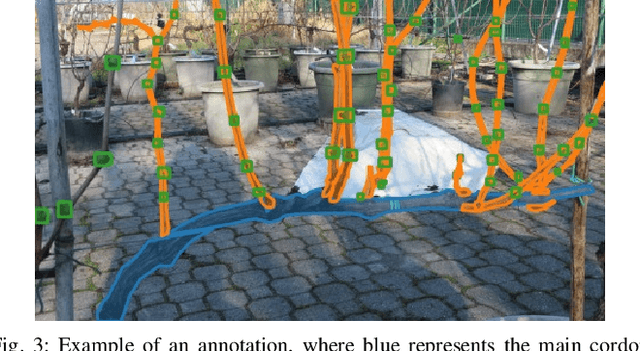
Grapevine winter pruning is a labor-intensive and repetitive process that significantly influences the quality and quantity of the grape harvest and produced wine of the following season. It requires a careful and expert detection of the point to be cut. Because of its complexity, repetitive nature and time constraint, the task requires skilled labor that needs to be trained. This extended abstract presents the computer vision pipeline employed in project Vinum, using detectron2 as a segmentation network and keypoint visual odometry to merge different observation into a single pointcloud used to make informed pruning decisions.
The Significance of Latent Data Divergence in Predicting System Degradation
Jun 13, 2024
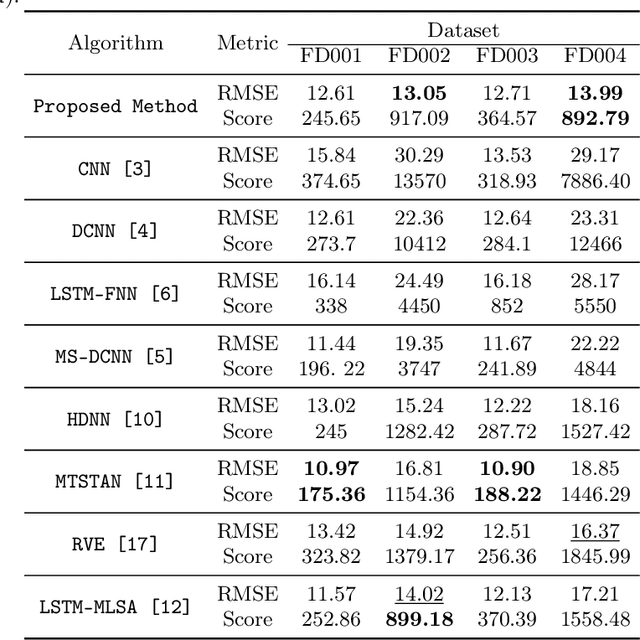
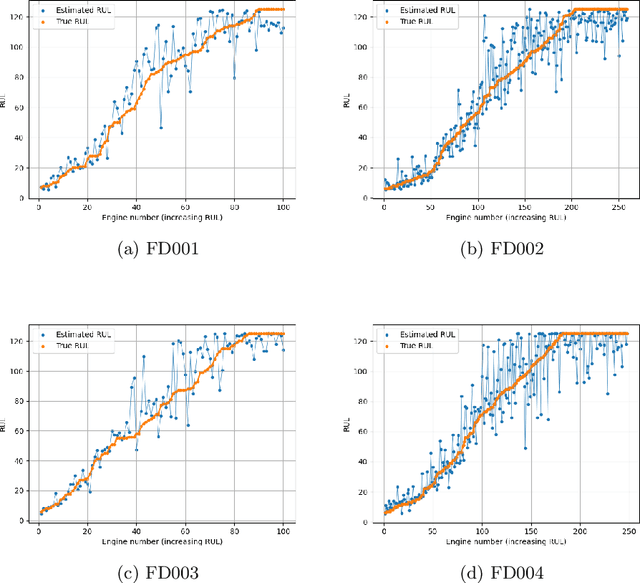
Condition-Based Maintenance is pivotal in enabling the early detection of potential failures in engineering systems, where precise prediction of the Remaining Useful Life is essential for effective maintenance and operation. However, a predominant focus in the field centers on predicting the Remaining Useful Life using unprocessed or minimally processed data, frequently neglecting the intricate dynamics inherent in the dataset. In this work we introduce a novel methodology grounded in the analysis of statistical similarity within latent data from system components. Leveraging a specifically designed architecture based on a Vector Quantized Variational Autoencoder, we create a sequence of discrete vectors which is used to estimate system-specific priors. We infer the similarity between systems by evaluating the divergence of these priors, offering a nuanced understanding of individual system behaviors. The efficacy of our approach is demonstrated through experiments on the NASA commercial modular aero-propulsion system simulation (C-MAPSS) dataset. Our validation not only underscores the potential of our method in advancing the study of latent statistical divergence but also demonstrates its superiority over existing techniques.
Computer-Vision Based Real Time Waypoint Generation for Autonomous Vineyard Navigation with Quadruped Robots
May 02, 2023The VINUM project seeks to address the shortage of skilled labor in modern vineyards by introducing a cutting-edge mobile robotic solution. Leveraging the capabilities of the quadruped robot, HyQReal, this system, equipped with arm and vision sensors, offers autonomous navigation and winter pruning of grapevines reducing the need for human intervention. At the heart of this approach lies an architecture that empowers the robot to easily navigate vineyards, identify grapevines with unparalleled accuracy, and approach them for pruning with precision. A state machine drives the process, deftly switching between various stages to ensure seamless and efficient task completion. The system's performance was assessed through experimentation, focusing on waypoint precision and optimizing the robot's workspace for single-plant operations. Results indicate that the architecture is highly reliable, with a mean error of 21.5cm and a standard deviation of 17.6cm for HyQReal. However, improvements in grapevine detection accuracy are necessary for optimal performance. This work is based on a computer-vision-based navigation method for quadruped robots in vineyards, opening up new possibilities for selective task automation. The system's architecture works well in ideal weather conditions, generating and arriving at precise waypoints that maximize the attached robotic arm's workspace. This work is an extension of our short paper presented at the Italian Conference on Robotics and Intelligent Machines (I-RIM).
FAIR-FATE: Fair Federated Learning with Momentum
Sep 27, 2022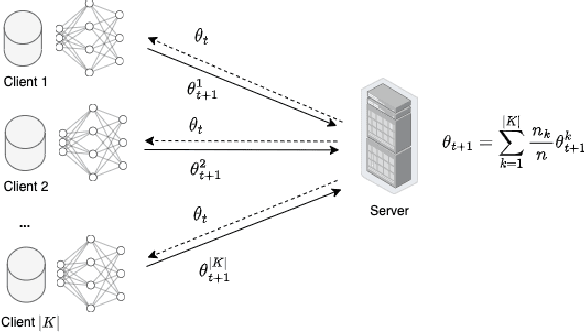
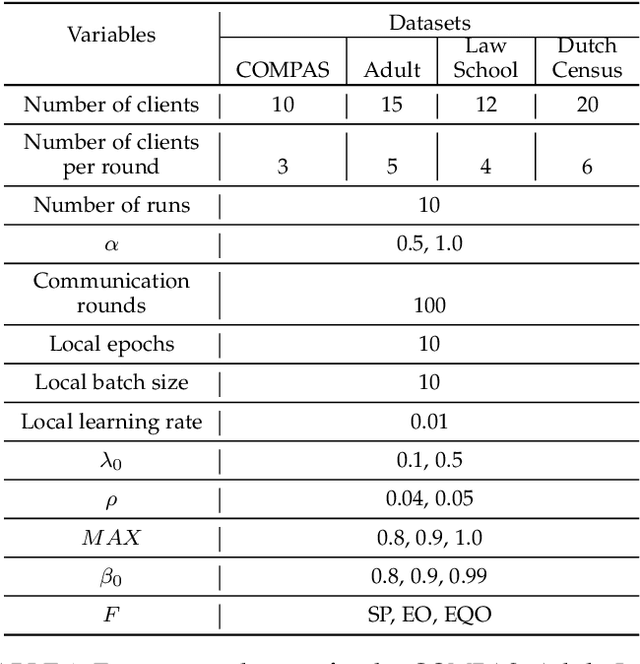
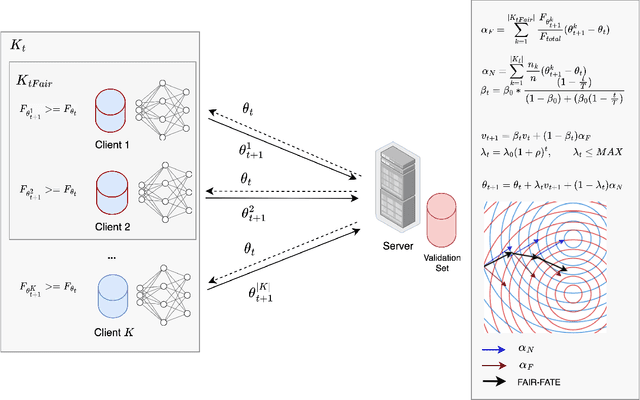
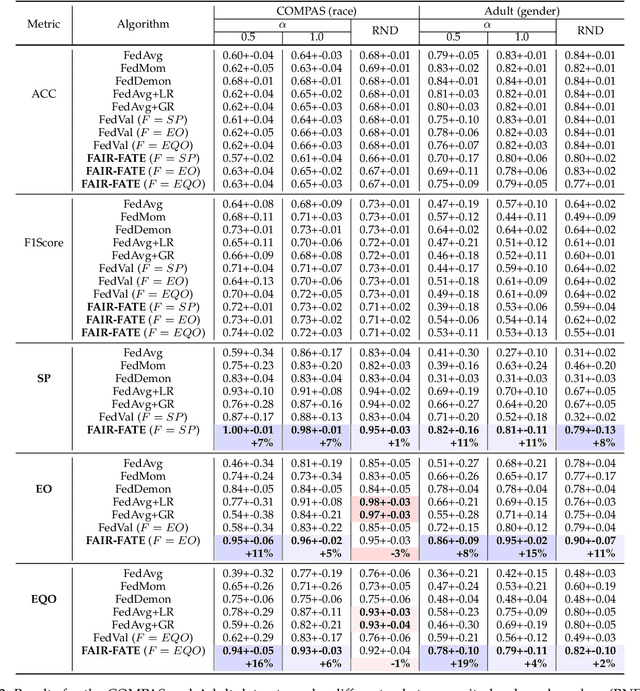
While fairness-aware machine learning algorithms have been receiving increasing attention, the focus has been on centralized machine learning, leaving decentralized methods underexplored. Federated Learning is a decentralized form of machine learning where clients train local models with a server aggregating them to obtain a shared global model. Data heterogeneity amongst clients is a common characteristic of Federated Learning, which may induce or exacerbate discrimination of unprivileged groups defined by sensitive attributes such as race or gender. In this work we propose FAIR-FATE: a novel FAIR FederATEd Learning algorithm that aims to achieve group fairness while maintaining high utility via a fairness-aware aggregation method that computes the global model by taking into account the fairness of the clients. To achieve that, the global model update is computed by estimating a fair model update using a Momentum term that helps to overcome the oscillations of noisy non-fair gradients. To the best of our knowledge, this is the first approach in machine learning that aims to achieve fairness using a fair Momentum estimate. Experimental results on four real-world datasets demonstrate that FAIR-FATE significantly outperforms state-of-the-art fair Federated Learning algorithms under different levels of data heterogeneity.
Towards Precise Pruning Points Detection using Semantic-Instance-Aware Plant Models for Grapevine Winter Pruning Automation
Sep 15, 2021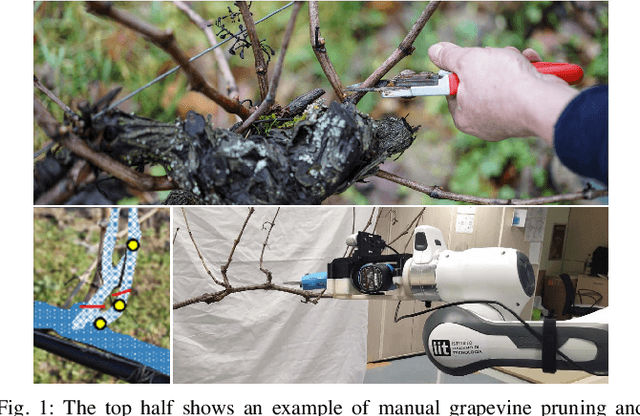
Grapevine winter pruning is a complex task, that requires skilled workers to execute it correctly. The complexity makes it time consuming. It is an operation that requires about 80-120 hours per hectare annually, making an automated robotic system that helps in speeding up the process a crucial tool in large-size vineyards. We will describe (a) a novel expert annotated dataset for grapevine segmentation, (b) a state of the art neural network implementation and (c) generation of pruning points following agronomic rules, leveraging the simplified structure of the plant. With this approach, we are able to generate a set of pruning points on the canes, paving the way towards a correct automation of grapevine winter pruning.
Grapevine Winter Pruning Automation: On Potential Pruning Points Detection through 2D Plant Modeling using Grapevine Segmentation
Jun 08, 2021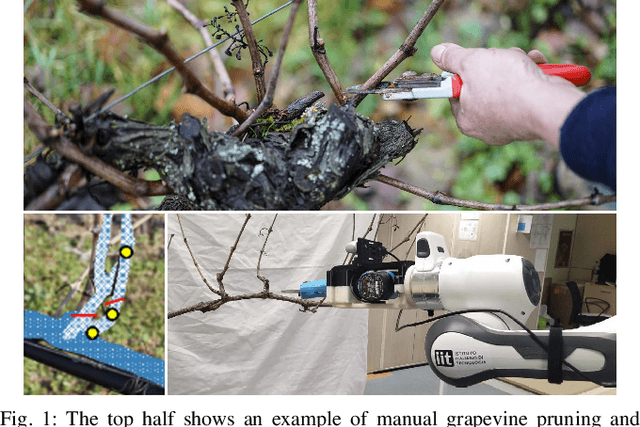

Grapevine winter pruning is a complex task, that requires skilled workers to execute it correctly. The complexity of this task is also the reason why it is time consuming. Considering that this operation takes about 80-120 hours/ha to be completed, and therefore is even more crucial in large-size vineyards, an automated system can help to speed up the process. To this end, this paper presents a novel multidisciplinary approach that tackles this challenging task by performing object segmentation on grapevine images, used to create a representative model of the grapevine plants. Second, a set of potential pruning points is generated from this plant representation. We will describe (a) a methodology for data acquisition and annotation, (b) a neural network fine-tuning for grapevine segmentation, (c) an image processing based method for creating the representative model of grapevines, starting from the inferred segmentation and (d) potential pruning points detection and localization, based on the plant model which is a simplification of the grapevine structure. With this approach, we are able to identify a significant set of potential pruning points on the canes, that can be used, with further selection, to derive the final set of the real pruning points.
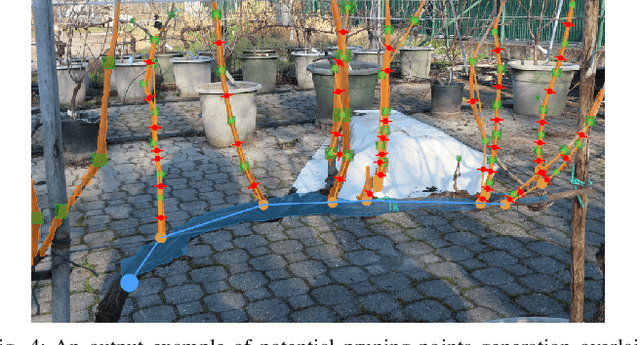
Whole-Body Control on Non-holonomic Mobile Manipulation for Grapevine Winter Pruning Automation
May 22, 2021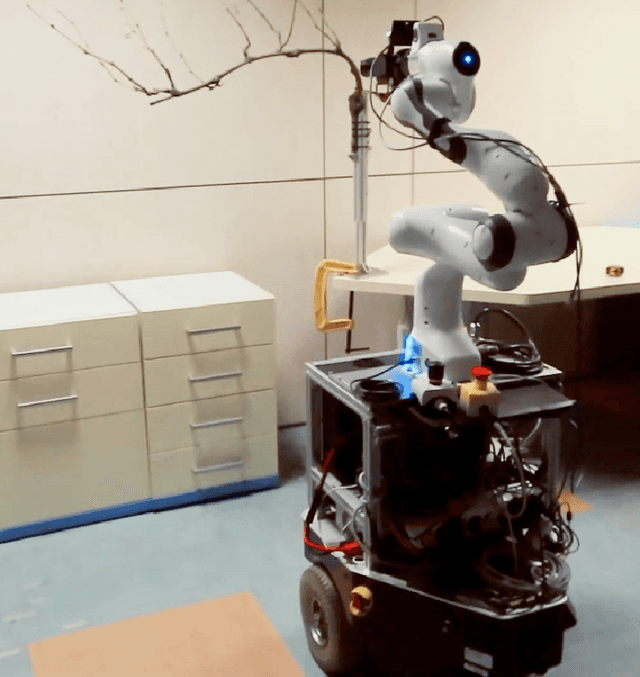
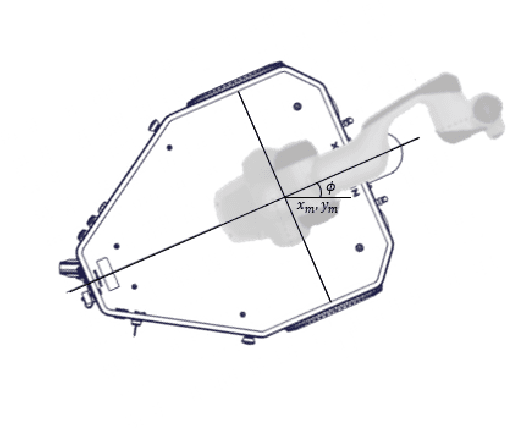
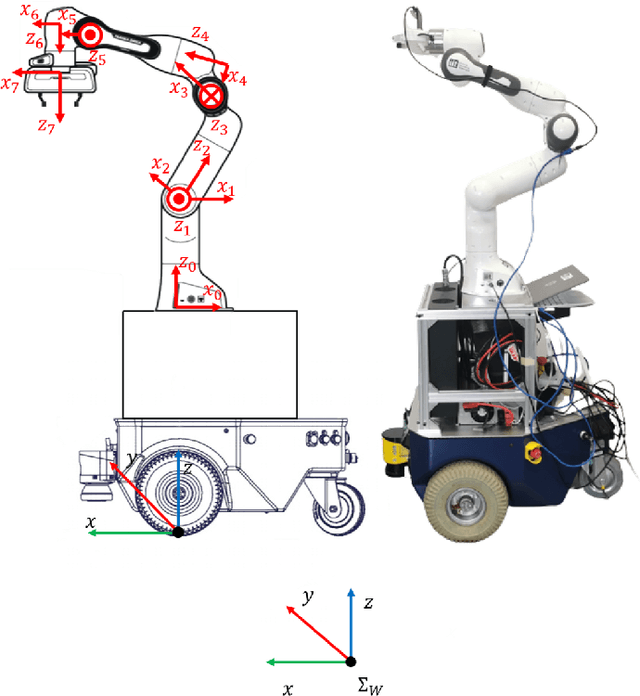
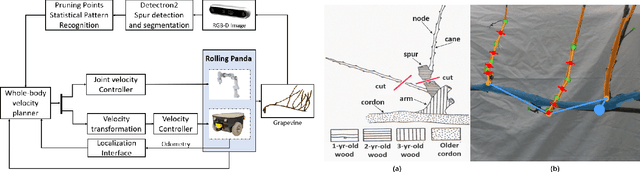
Mobile manipulators that combine mobility and manipulability, are increasingly being used for various unstructured application scenarios in the field, e.g. vineyards. Therefore, the coordinated motion of the mobile base and manipulator is an essential feature of the overall performance. In this paper, we explore a whole-body motion controller of a robot which is composed of a 2-DoFs non-holonomic wheeled mobile base with a 7-DoFs manipulator (non-holonomic wheeled mobile manipulator, NWMM) This robotic platform is designed to efficiently undertake complex grapevine pruning tasks. In the control framework, a task priority coordinated motion of the NWMM is guaranteed. Lower-priority tasks are projected into the null space of the top-priority tasks so that higher-priority tasks are completed without interruption from lower-priority tasks. The proposed controller was evaluated in a grapevine spur pruning experiment scenario.
The Importance and the Limitations of Sim2Real for Robotic Manipulation in Precision Agriculture
Aug 10, 2020
In recent years Sim2Real approaches have brought great results to robotics. Techniques such as model-based learning or domain randomization can help overcome the gap between simulation and reality, but in some situations simulation accuracy is still needed. An example is agricultural robotics, which needs detailed simulations, both in terms of dynamics and visuals. However, simulation software is still not capable of such quality and accuracy. Current Sim2Real techniques are helpful in mitigating the problem, but for these specific tasks they are not enough.
A Time-Segmented Consortium Blockchain for Robotic Event Registration
May 14, 2019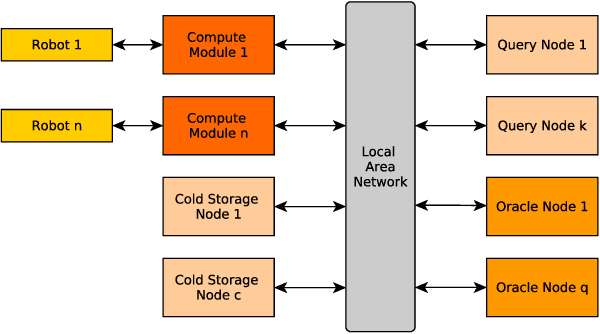
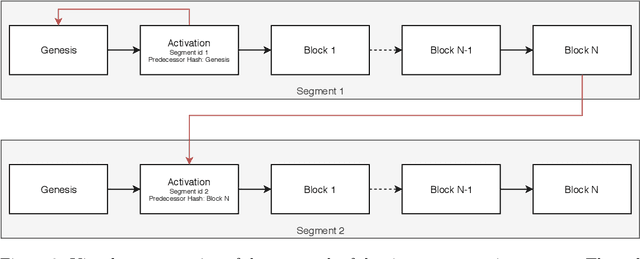
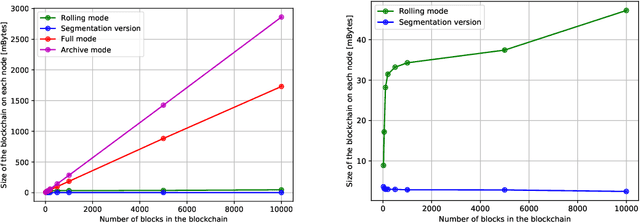
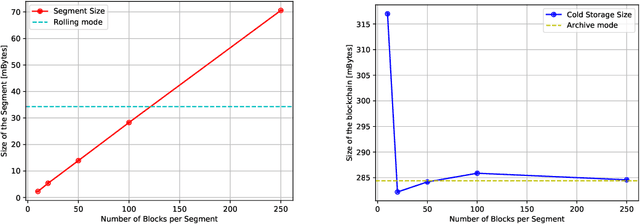
A blockchain, during its lifetime, records large amounts of data, that in a common usage its kept on its entirety. In a robotics environment, the old information is useful for human evaluation, or oracles interfacing with the blockchain but it is not useful for the robots that require only current information in order to continue their work. This causes a storage problem in blockchain nodes that have limited storage capacity, such as in the case of nodes attached to robots that are usually built around embedded solutions. This paper presents a time-segmentation solution for devices with limited storage capacity, integrated in a particular robot-directed blockchain called RobotChain. Results are presented regarding the proposed solution that show that the goal of restricting each node's capacity is reached without compromising all the benefits that arise from the use of blockchains in these contexts, and on the contrary, it allows for cheap nodes to use this blockchain, reduces storage costs and allows faster deployment of new nodes.