 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Time-Segmented Consortium Blockchain for Robotic Event Registration
Paper and Code
May 14, 2019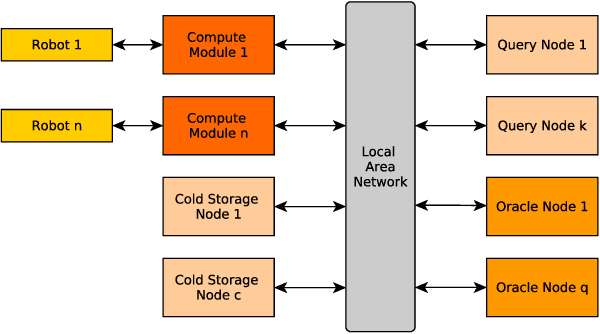
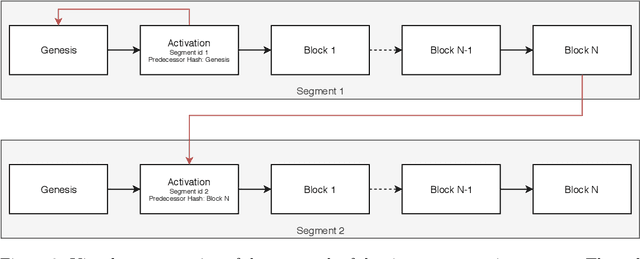
A blockchain, during its lifetime, records large amounts of data, that in a common usage its kept on its entirety. In a robotics environment, the old information is useful for human evaluation, or oracles interfacing with the blockchain but it is not useful for the robots that require only current information in order to continue their work. This causes a storage problem in blockchain nodes that have limited storage capacity, such as in the case of nodes attached to robots that are usually built around embedded solutions. This paper presents a time-segmentation solution for devices with limited storage capacity, integrated in a particular robot-directed blockchain called RobotChain. Results are presented regarding the proposed solution that show that the goal of restricting each node's capacity is reached without compromising all the benefits that arise from the use of blockchains in these contexts, and on the contrary, it allows for cheap nodes to use this blockchain, reduces storage costs and allows faster deployment of new nodes.