 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Proprioceptive-Only Benchmark for Quadruped State Estimation: ATE, RPE, and Runtime Trade-offs Between Filters and Smoothers
May 12, 2026We compare three state-of-the-art proprioceptive state estimators for quadruped robots: MUSE [1], the Invariant Extended Kalman Filter (IEKF) [2], and the Invariant Smoother (IS) [3], on the CYN-1 sequence of the GrandTour Dataset [4]. Our goal is to give practitioners clear guidance on accuracy and computation time: we report long-term accuracy (Absolute Trajectory Error, ATE), short-term accuracy (translational and rotational Relative Pose Error, RPE), and per-update computation time on a fixed hardware/software stack. On this dataset, RPEs are broadly similar across methods, while IEKF and IS achieve a lower ATE than MUSE. Runtime results highlight the accuracy-latency trade-offs across the three approaches. In the discussion, we outline the evaluation choices used to ensure a fair comparison and analyze factors that influence short-horizon metrics. Overall, this study provides a concise snapshot of accuracy and cost, helping readers choose an estimator that fits their application constraints, with all evaluation code and documentation released open-source at https://github.com/iit-DLSLab/state_estimation_benchmark for full reproducibility.
BinWalker: Development and Field Evaluation of a Quadruped Manipulator Platform for Sustainable Litter Collection
Mar 11, 2026Litter pollution represents a growing environmental problem affecting natural and urban ecosystems worldwide. Waste discarded in public spaces often accumulates in areas that are difficult to access, such as uneven terrains, coastal environments, parks, and roadside vegetation. Over time, these materials degrade and release harmful substances, including toxic chemicals and microplastics, which can contaminate soil and water and pose serious threats to wildlife and human health. Despite increasing awareness of the problem, litter collection is still largely performed manually by human operators, making large-scale cleanup operations labor-intensive, time-consuming, and costly. Robotic solutions have the potential to support and partially automate environmental cleanup tasks. In this work, we present a quadruped robotic system designed for autonomous litter collection in challenging outdoor scenarios. The robot combines the mobility advantages of legged locomotion with a manipulation system consisting of a robotic arm and an onboard litter container. This configuration enables the robot to detect, grasp, and store litter items while navigating through uneven terrains. The proposed system aims to demonstrate the feasibility of integrating perception, locomotion, and manipulation on a legged robotic platform for environmental cleanup tasks. Experimental evaluations conducted in outdoor scenarios highlight the effectiveness of the approach and its potential for assisting large-scale litter removal operations in environments that are difficult to reach with traditional robotic platforms. The code associated with this work can be found at: https://github.com/iit-DLSLab/trash-collection-isaaclab.
Towards Proprioceptive Terrain Mapping with Quadruped Robots for Exploration in Planetary Permanently Shadowed Regions
Oct 21, 2025



Permanently Shadowed Regions (PSRs) near the lunar poles are of interest for future exploration due to their potential to contain water ice and preserve geological records. Their complex, uneven terrain favors the use of legged robots, which can traverse challenging surfaces while collecting in-situ data, and have proven effective in Earth analogs, including dark caves, when equipped with onboard lighting. While exteroceptive sensors like cameras and lidars can capture terrain geometry and even semantic information, they cannot quantify its physical interaction with the robot, a capability provided by proprioceptive sensing. We propose a terrain mapping framework for quadruped robots, which estimates elevation, foot slippage, energy cost, and stability margins from internal sensing during locomotion. These metrics are incrementally integrated into a multi-layer 2.5D gridmap that reflects terrain interaction from the robot's perspective. The system is evaluated in a simulator that mimics a lunar environment, using the 21 kg quadruped robot Aliengo, showing consistent mapping performance under lunar gravity and terrain conditions.
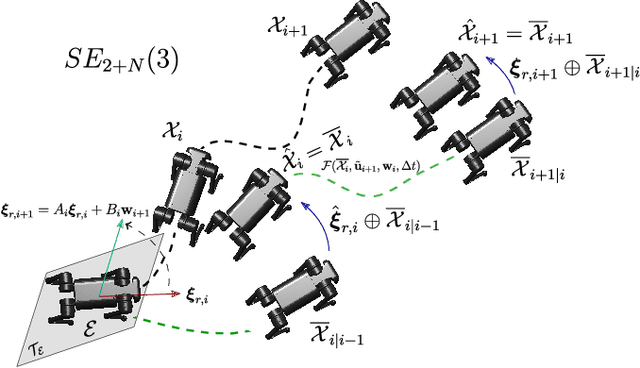
Multi-Sensor Fusion for Quadruped Robot State Estimation using Invariant Filtering and Smoothing
Apr 29, 2025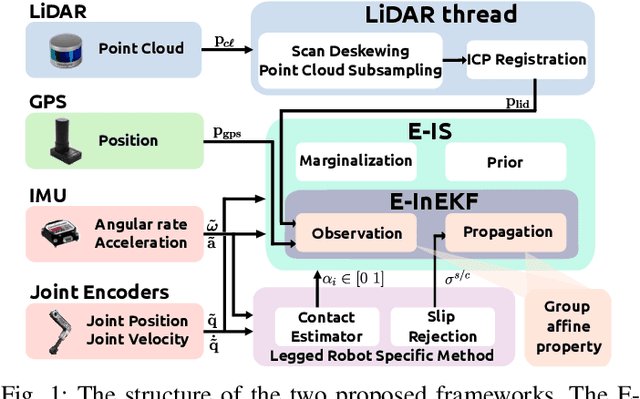

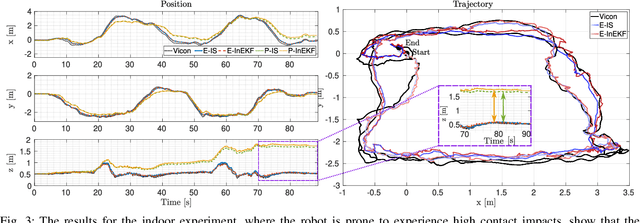
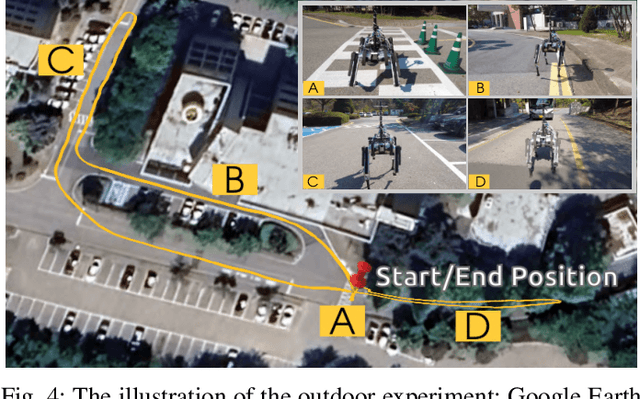
This letter introduces two multi-sensor state estimation frameworks for quadruped robots, built on the Invariant Extended Kalman Filter (InEKF) and Invariant Smoother (IS). The proposed methods, named E-InEKF and E-IS, fuse kinematics, IMU, LiDAR, and GPS data to mitigate position drift, particularly along the z-axis, a common issue in proprioceptive-based approaches. We derived observation models that satisfy group-affine properties to integrate LiDAR odometry and GPS into InEKF and IS. LiDAR odometry is incorporated using Iterative Closest Point (ICP) registration on a parallel thread, preserving the computational efficiency of proprioceptive-based state estimation. We evaluate E-InEKF and E-IS with and without exteroceptive sensors, benchmarking them against LiDAR-based odometry methods in indoor and outdoor experiments using the KAIST HOUND2 robot. Our methods achieve lower Relative Position Errors (RPE) and significantly reduce Absolute Trajectory Error (ATE), with improvements of up to 28% indoors and 40% outdoors compared to LIO-SAM and FAST-LIO2. Additionally, we compare E-InEKF and E-IS in terms of computational efficiency and accuracy.
MUSE: A Real-Time Multi-Sensor State Estimator for Quadruped Robots
Mar 15, 2025
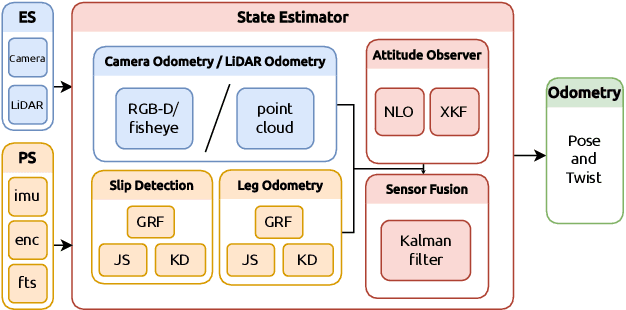
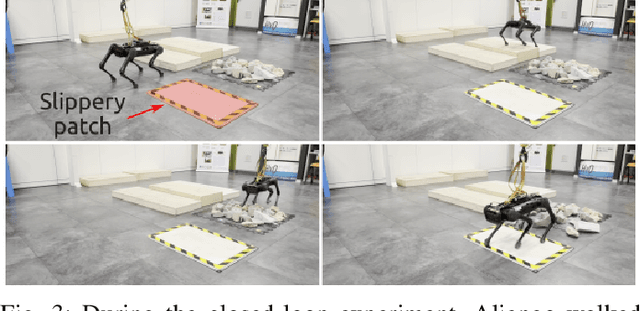
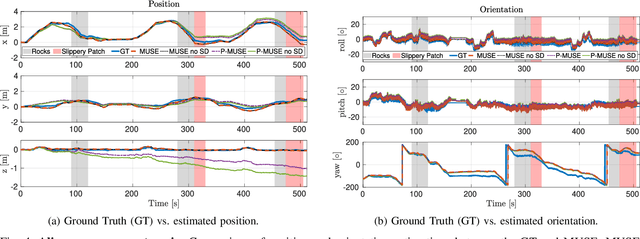
This paper introduces an innovative state estimator, MUSE (MUlti-sensor State Estimator), designed to enhance state estimation's accuracy and real-time performance in quadruped robot navigation. The proposed state estimator builds upon our previous work presented in [1]. It integrates data from a range of onboard sensors, including IMUs, encoders, cameras, and LiDARs, to deliver a comprehensive and reliable estimation of the robot's pose and motion, even in slippery scenarios. We tested MUSE on a Unitree Aliengo robot, successfully closing the locomotion control loop in difficult scenarios, including slippery and uneven terrain. Benchmarking against Pronto [2] and VILENS [3] showed 67.6% and 26.7% reductions in translational errors, respectively. Additionally, MUSE outperformed DLIO [4], a LiDAR-inertial odometry system in rotational errors and frequency, while the proprioceptive version of MUSE (P-MUSE) outperformed TSIF [5], with a 45.9% reduction in absolute trajectory error (ATE).
SANDRO: a Robust Solver with a Splitting Strategy for Point Cloud Registration
Mar 10, 2025


Point cloud registration is a critical problem in computer vision and robotics, especially in the field of navigation. Current methods often fail when faced with high outlier rates or take a long time to converge to a suitable solution. In this work, we introduce a novel algorithm for point cloud registration called SANDRO (Splitting strategy for point cloud Alignment using Non-convex anD Robust Optimization), which combines an Iteratively Reweighted Least Squares (IRLS) framework with a robust loss function with graduated non-convexity. This approach is further enhanced by a splitting strategy designed to handle high outlier rates and skewed distributions of outliers. SANDRO is capable of addressing important limitations of existing methods, as in challenging scenarios where the presence of high outlier rates and point cloud symmetries significantly hinder convergence. SANDRO achieves superior performance in terms of success rate when compared to the state-of-the-art methods, demonstrating a 20% improvement from the current state of the art when tested on the Redwood real dataset and 60% improvement when tested on synthetic data.
Proprioceptive State Estimation for Quadruped Robots using Invariant Kalman Filtering and Scale-Variant Robust Cost Functions
Oct 07, 2024
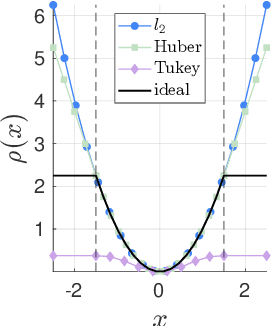

Accurate state estimation is crucial for legged robot locomotion, as it provides the necessary information to allow control and navigation. However, it is also challenging, especially in scenarios with uneven and slippery terrain. This paper presents a new Invariant Extended Kalman filter for legged robot state estimation using only proprioceptive sensors. We formulate the methodology by combining recent advances in state estimation theory with the use of robust cost functions in the measurement update. We tested our methodology on quadruped robots through experiments and public datasets, showing that we can obtain a pose drift up to 40% lower in trajectories covering a distance of over 450m, in comparison with a state-of-the-art Invariant Extended Kalman filter.
Creating a Segmented Pointcloud of Grapevines by Combining Multiple Viewpoints Through Visual Odometry
Aug 29, 2024


Grapevine winter pruning is a labor-intensive and repetitive process that significantly influences the quality and quantity of the grape harvest and produced wine of the following season. It requires a careful and expert detection of the point to be cut. Because of its complexity, repetitive nature and time constraint, the task requires skilled labor that needs to be trained. This extended abstract presents the computer vision pipeline employed in project Vinum, using detectron2 as a segmentation network and keypoint visual odometry to merge different observation into a single pointcloud used to make informed pruning decisions.
Panoptic-SLAM: Visual SLAM in Dynamic Environments using Panoptic Segmentation
May 03, 2024



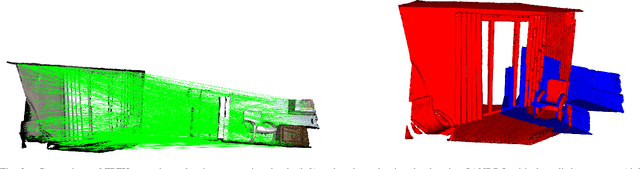
The majority of visual SLAM systems are not robust in dynamic scenarios. The ones that deal with dynamic objects in the scenes usually rely on deep-learning-based methods to detect and filter these objects. However, these methods cannot deal with unknown moving objects. This work presents Panoptic-SLAM, an open-source visual SLAM system robust to dynamic environments, even in the presence of unknown objects. It uses panoptic segmentation to filter dynamic objects from the scene during the state estimation process. Panoptic-SLAM is based on ORB-SLAM3, a state-of-the-art SLAM system for static environments. The implementation was tested using real-world datasets and compared with several state-of-the-art systems from the literature, including DynaSLAM, DS-SLAM, SaD-SLAM, PVO and FusingPanoptic. For example, Panoptic-SLAM is on average four times more accurate than PVO, the most recent panoptic-based approach for visual SLAM. Also, experiments were performed using a quadruped robot with an RGB-D camera to test the applicability of our method in real-world scenarios. The tests were validated by a ground-truth created with a motion capture system.
Visual Localization and Mapping in Dynamic and Changing Environments
Sep 21, 2022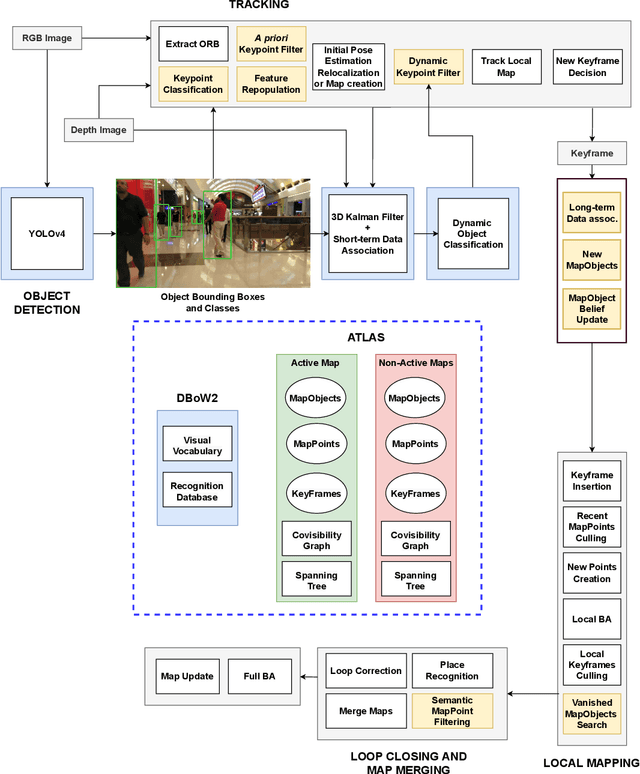
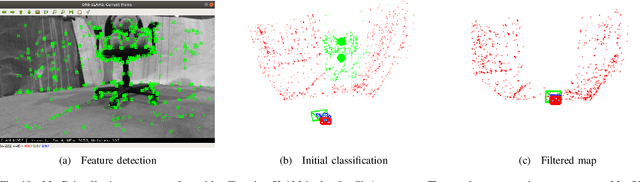
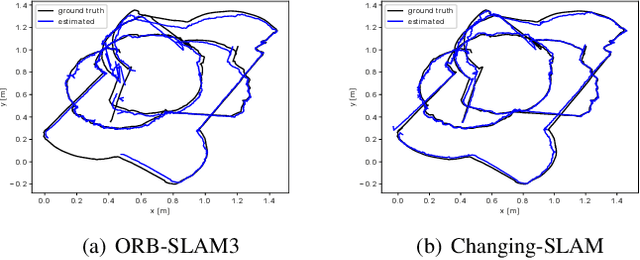
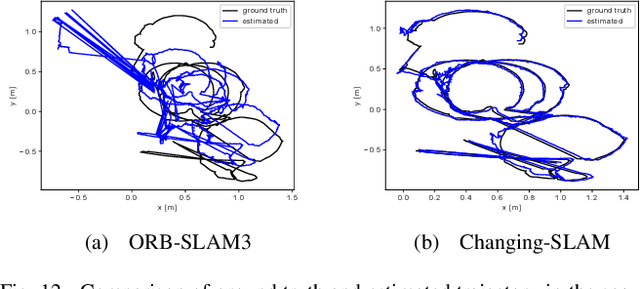
The real-world deployment of fully autonomous mobile robots depends on a robust SLAM (Simultaneous Localization and Mapping) system, capable of handling dynamic environments, where objects are moving in front of the robot, and changing environments, where objects are moved or replaced after the robot has already mapped the scene. This paper presents Changing-SLAM, a method for robust Visual SLAM in both dynamic and changing environments. This is achieved by using a Bayesian filter combined with a long-term data association algorithm. Also, it employs an efficient algorithm for dynamic keypoints filtering based on object detection that correctly identify features inside the bounding box that are not dynamic, preventing a depletion of features that could cause lost tracks. Furthermore, a new dataset was developed with RGB-D data especially designed for the evaluation of changing environments on an object level, called PUC-USP dataset. Six sequences were created using a mobile robot, an RGB-D camera and a motion capture system. The sequences were designed to capture different scenarios that could lead to a tracking failure or a map corruption. To the best of our knowledge, Changing-SLAM is the first Visual SLAM system that is robust to both dynamic and changing environments, not assuming a given camera pose or a known map, being also able to operate in real time. The proposed method was evaluated using benchmark datasets and compared with other state-of-the-art methods, proving to be highly accurate.