 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Sensor Fusion for Quadruped Robot State Estimation using Invariant Filtering and Smoothing
Apr 29, 2025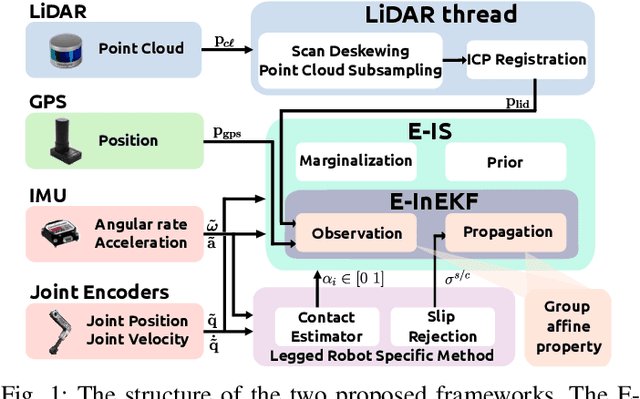

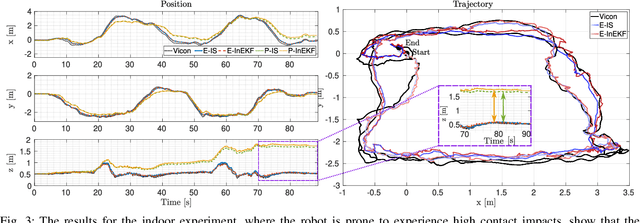
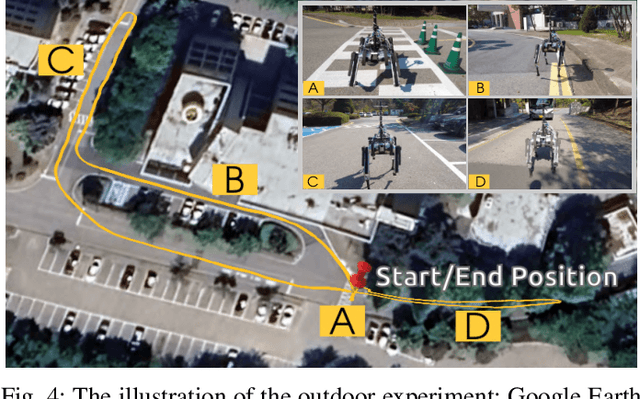
This letter introduces two multi-sensor state estimation frameworks for quadruped robots, built on the Invariant Extended Kalman Filter (InEKF) and Invariant Smoother (IS). The proposed methods, named E-InEKF and E-IS, fuse kinematics, IMU, LiDAR, and GPS data to mitigate position drift, particularly along the z-axis, a common issue in proprioceptive-based approaches. We derived observation models that satisfy group-affine properties to integrate LiDAR odometry and GPS into InEKF and IS. LiDAR odometry is incorporated using Iterative Closest Point (ICP) registration on a parallel thread, preserving the computational efficiency of proprioceptive-based state estimation. We evaluate E-InEKF and E-IS with and without exteroceptive sensors, benchmarking them against LiDAR-based odometry methods in indoor and outdoor experiments using the KAIST HOUND2 robot. Our methods achieve lower Relative Position Errors (RPE) and significantly reduce Absolute Trajectory Error (ATE), with improvements of up to 28% indoors and 40% outdoors compared to LIO-SAM and FAST-LIO2. Additionally, we compare E-InEKF and E-IS in terms of computational efficiency and accuracy.
MUSE: A Real-Time Multi-Sensor State Estimator for Quadruped Robots
Mar 15, 2025
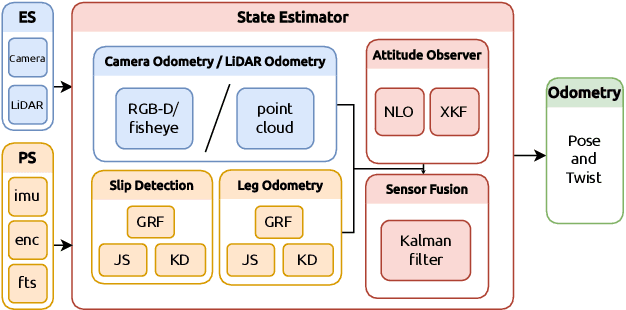
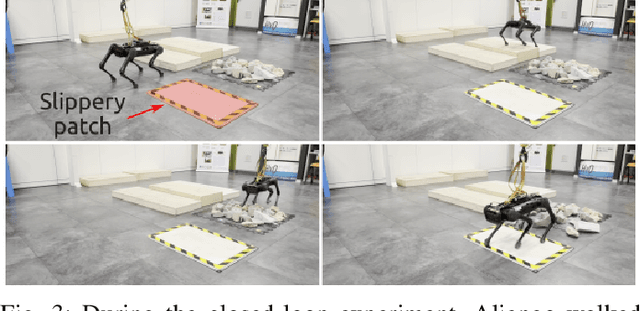
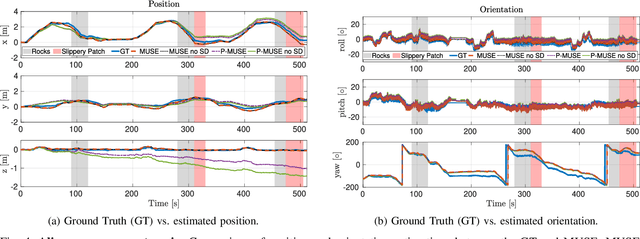
This paper introduces an innovative state estimator, MUSE (MUlti-sensor State Estimator), designed to enhance state estimation's accuracy and real-time performance in quadruped robot navigation. The proposed state estimator builds upon our previous work presented in [1]. It integrates data from a range of onboard sensors, including IMUs, encoders, cameras, and LiDARs, to deliver a comprehensive and reliable estimation of the robot's pose and motion, even in slippery scenarios. We tested MUSE on a Unitree Aliengo robot, successfully closing the locomotion control loop in difficult scenarios, including slippery and uneven terrain. Benchmarking against Pronto [2] and VILENS [3] showed 67.6% and 26.7% reductions in translational errors, respectively. Additionally, MUSE outperformed DLIO [4], a LiDAR-inertial odometry system in rotational errors and frequency, while the proprioceptive version of MUSE (P-MUSE) outperformed TSIF [5], with a 45.9% reduction in absolute trajectory error (ATE).
Proprioceptive State Estimation for Quadruped Robots using Invariant Kalman Filtering and Scale-Variant Robust Cost Functions
Oct 07, 2024
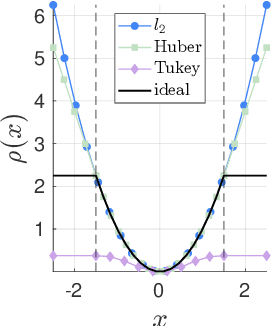

Accurate state estimation is crucial for legged robot locomotion, as it provides the necessary information to allow control and navigation. However, it is also challenging, especially in scenarios with uneven and slippery terrain. This paper presents a new Invariant Extended Kalman filter for legged robot state estimation using only proprioceptive sensors. We formulate the methodology by combining recent advances in state estimation theory with the use of robust cost functions in the measurement update. We tested our methodology on quadruped robots through experiments and public datasets, showing that we can obtain a pose drift up to 40% lower in trajectories covering a distance of over 450m, in comparison with a state-of-the-art Invariant Extended Kalman filter.