 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrimal-Dual iLQR for GPU-Accelerated Learning and Control in Legged Robots
Jun 09, 2025This paper introduces a novel Model Predictive Control (MPC) implementation for legged robot locomotion that leverages GPU parallelization. Our approach enables both temporal and state-space parallelization by incorporating a parallel associative scan to solve the primal-dual Karush-Kuhn-Tucker (KKT) system. In this way, the optimal control problem is solved in $\mathcal{O}(n\log{N} + m)$ complexity, instead of $\mathcal{O}(N(n + m)^3)$, where $n$, $m$, and $N$ are the dimension of the system state, control vector, and the length of the prediction horizon. We demonstrate the advantages of this implementation over two state-of-the-art solvers (acados and crocoddyl), achieving up to a 60\% improvement in runtime for Whole Body Dynamics (WB)-MPC and a 700\% improvement for Single Rigid Body Dynamics (SRBD)-MPC when varying the prediction horizon length. The presented formulation scales efficiently with the problem state dimensions as well, enabling the definition of a centralized controller for up to 16 legged robots that can be computed in less than 25 ms. Furthermore, thanks to the JAX implementation, the solver supports large-scale parallelization across multiple environments, allowing the possibility of performing learning with the MPC in the loop directly in GPU.
MUSE: A Real-Time Multi-Sensor State Estimator for Quadruped Robots
Mar 15, 2025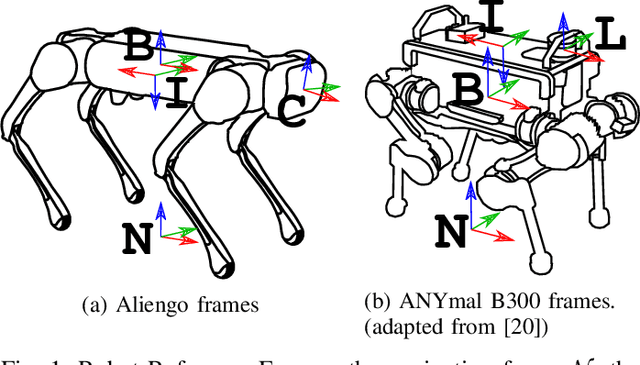
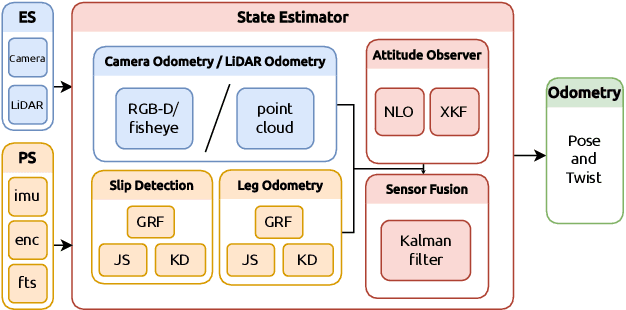
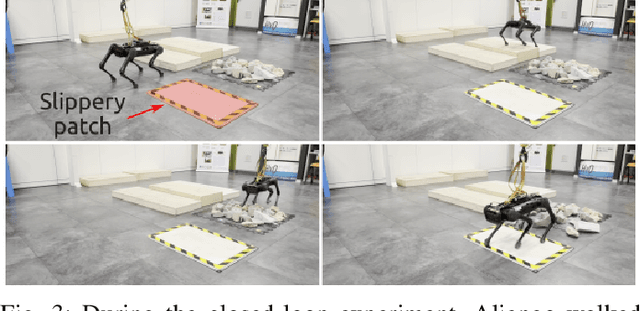
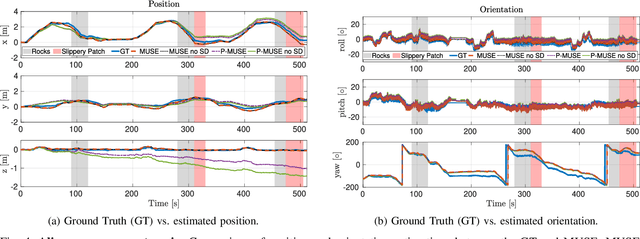
This paper introduces an innovative state estimator, MUSE (MUlti-sensor State Estimator), designed to enhance state estimation's accuracy and real-time performance in quadruped robot navigation. The proposed state estimator builds upon our previous work presented in [1]. It integrates data from a range of onboard sensors, including IMUs, encoders, cameras, and LiDARs, to deliver a comprehensive and reliable estimation of the robot's pose and motion, even in slippery scenarios. We tested MUSE on a Unitree Aliengo robot, successfully closing the locomotion control loop in difficult scenarios, including slippery and uneven terrain. Benchmarking against Pronto [2] and VILENS [3] showed 67.6% and 26.7% reductions in translational errors, respectively. Additionally, MUSE outperformed DLIO [4], a LiDAR-inertial odometry system in rotational errors and frequency, while the proprioceptive version of MUSE (P-MUSE) outperformed TSIF [5], with a 45.9% reduction in absolute trajectory error (ATE).
Non-Gaited Legged Locomotion with Monte-Carlo Tree Search and Supervised Learning
Aug 14, 2024


Legged robots are able to navigate complex terrains by continuously interacting with the environment through careful selection of contact sequences and timings. However, the combinatorial nature behind contact planning hinders the applicability of such optimization problems on hardware. In this work, we present a novel approach that optimizes gait sequences and respective timings for legged robots in the context of optimization-based controllers through the use of sampling-based methods and supervised learning techniques. We propose to bootstrap the search by learning an optimal value function in order to speed-up the gait planning procedure making it applicable in real-time. To validate our proposed method, we showcase its performance both in simulation and on hardware using a 22 kg electric quadruped robot. The method is assessed on different terrains, under external perturbations, and in comparison to a standard control approach where the gait sequence is fixed a priori.
Accelerating Model Predictive Control for Legged Robots through Distributed Optimization
Mar 27, 2024



This paper presents a novel approach to enhance Model Predictive Control (MPC) for legged robots through Distributed Optimization. Our method focuses on decomposing the robot dynamics into smaller, parallelizable subsystems, and utilizing the Alternating Direction Method of Multipliers (ADMM) to ensure consensus among them. Each subsystem is managed by its own Optimal Control Problem, with ADMM facilitating consistency between their optimizations. This approach not only decreases the computational time but also allows for effective scaling with more complex robot configurations, facilitating the integration of additional subsystems such as articulated arms on a quadruped robot. We demonstrate, through numerical evaluations, the convergence of our approach on two systems with increasing complexity. In addition, we showcase that our approach converges towards the same solution when compared to a state-of-the-art centralized whole-body MPC implementation. Moreover, we quantitatively compare the computational efficiency of our method to the centralized approach, revealing up to a 75\% reduction in computational time. Overall, our approach offers a promising avenue for accelerating MPC solutions for legged robots, paving the way for more effective utilization of the computational performance of modern hardware.
On the Benefits of GPU Sample-Based Stochastic Predictive Controllers for Legged Locomotion
Mar 18, 2024Quadrupedal robots excel in mobility, navigating complex terrains with agility. However, their complex control systems present challenges that are still far from being fully addressed. In this paper, we introduce the use of Sample-Based Stochastic control strategies for quadrupedal robots, as an alternative to traditional optimal control laws. We show that Sample-Based Stochastic methods, supported by GPU acceleration, can be effectively applied to real quadruped robots. In particular, in this work, we focus on achieving gait frequency adaptation, a notable challenge in quadrupedal locomotion for gradient-based methods. To validate the effectiveness of Sample-Based Stochastic controllers we test two distinct approaches for quadrupedal robots and compare them against a conventional gradient-based Model Predictive Control system. Our findings, validated both in simulation and on a real 21Kg Aliengo quadruped, demonstrate that our method is on par with a traditional Model Predictive Control strategy when the robot is subject to zero or moderate disturbance, while it surpasses gradient-based methods in handling sustained external disturbances, thanks to the straightforward gait adaptation strategy that is possible to achieve within their formulation.
Fast Convex Visual Foothold Adaptation for Quadrupedal Locomotion
Jul 27, 2023This extended abstract provides a short introduction on our recently developed perception-based controller for quadrupedal locomotion. Compared to our previous approach based on Visual Foothold Adaptation (VFA) and Model Predictive Control (MPC), our new framework combines a fast approximation of the safe foothold regions based on Neural Network regression, followed by a convex decomposition routine in order to generate safe landing areas where the controller can freely optimize the footholds location. The aforementioned framework, which combines prediction, convex decomposition, and MPC solution, is tested in simulation on our 140kg hydraulic quadruped robot (HyQReal).
SafeSteps: Learning Safer Footstep Planning Policies for Legged Robots via Model-Based Priors
Jul 24, 2023We present a footstep planning policy for quadrupedal locomotion that is able to directly take into consideration a-priori safety information in its decisions. At its core, a learning process analyzes terrain patches, classifying each landing location by its kinematic feasibility, shin collision, and terrain roughness. This information is then encoded into a small vector representation and passed as an additional state to the footstep planning policy, which furthermore proposes only safe footstep location by applying a masked variant of the Proximal Policy Optimization (PPO) algorithm. The performance of the proposed approach is shown by comparative simulations on an electric quadruped robot walking in different rough terrain scenarios. We show that violations of the above safety conditions are greatly reduced both during training and the successive deployment of the policy, resulting in an inherently safer footstep planner. Furthermore, we show how, as a byproduct, fewer reward terms are needed to shape the behavior of the policy, which in return is able to achieve both better final performances and sample efficiency
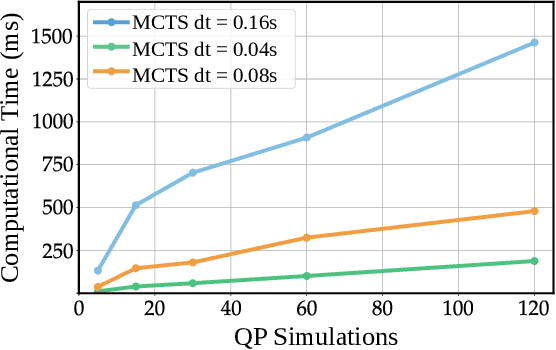
Monte Carlo Tree Search Gait Planner for Non-Gaited Legged System Control
May 28, 2022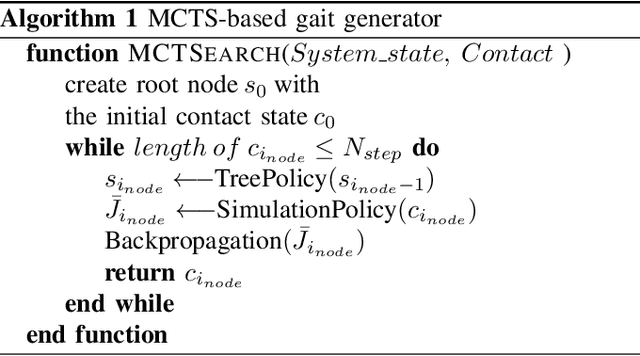
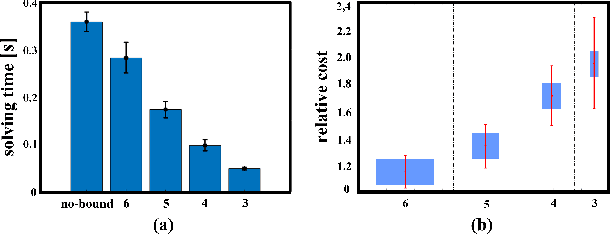
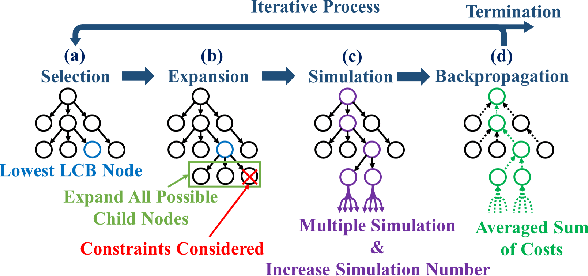
In this work, a non-gaited framework for legged system locomotion is presented. The approach decouples the gait sequence optimization by considering the problem as a decision-making process. The redefined contact sequence problem is solved by utilizing a Monte Carlo Tree Search (MCTS) algorithm that exploits optimization-based simulations to evaluate the best search direction. The proposed scheme has proven to have a good trade-off between exploration and exploitation of the search space compared to the state-of-the-art Mixed-Integer Quadratic Programming (MIQP). The model predictive control (MPC) utilizes the gait generated by the MCTS to optimize the ground reaction forces and future footholds position. The simulation results, performed on a quadruped robot, showed that the proposed framework could generate known periodic gait and adapt the contact sequence to the encountered conditions, including external forces and terrain with unknown and variable properties. When tested on robots with different layouts, the system has also shown its reliability.