 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysically Consistent Humanoid Loco-Manipulation using Latent Diffusion Models
Apr 23, 2025This paper uses the capabilities of latent diffusion models (LDMs) to generate realistic RGB human-object interaction scenes to guide humanoid loco-manipulation planning. To do so, we extract from the generated images both the contact locations and robot configurations that are then used inside a whole-body trajectory optimization (TO) formulation to generate physically consistent trajectories for humanoids. We validate our full pipeline in simulation for different long-horizon loco-manipulation scenarios and perform an extensive analysis of the proposed contact and robot configuration extraction pipeline. Our results show that using the information extracted from LDMs, we can generate physically consistent trajectories that require long-horizon reasoning.
Physically-Consistent Parameter Identification of Robots in Contact
Sep 15, 2024



Accurate inertial parameter identification is crucial for the simulation and control of robots encountering intermittent contact with the environment. Classically, robots' inertial parameters are obtained from CAD models that are not precise (and sometimes not available, e.g., Spot from Boston Dynamics), hence requiring identification. To do that, existing methods require access to contact force measurement, a modality not present in modern quadruped and humanoid robots. This paper presents an alternative technique that utilizes joint current/torque measurements -- a standard sensing modality in modern robots -- to identify inertial parameters without requiring direct contact force measurements. By projecting the whole-body dynamics into the null space of contact constraints, we eliminate the dependency on contact forces and reformulate the identification problem as a linear matrix inequality that can handle physical and geometrical constraints. We compare our proposed method against a common black-box identification mrethod using a deep neural network and show that incorporating physical consistency significantly improves the sample efficiency and generalizability of the model. Finally, we validate our method on the Spot quadruped robot across various locomotion tasks, showcasing its accuracy and generalizability in real-world scenarios over different gaits.
Non-Gaited Legged Locomotion with Monte-Carlo Tree Search and Supervised Learning
Aug 14, 2024


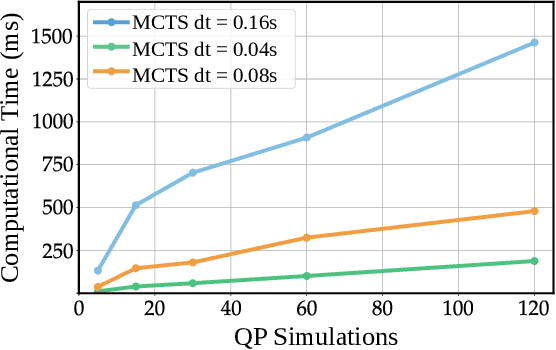
Legged robots are able to navigate complex terrains by continuously interacting with the environment through careful selection of contact sequences and timings. However, the combinatorial nature behind contact planning hinders the applicability of such optimization problems on hardware. In this work, we present a novel approach that optimizes gait sequences and respective timings for legged robots in the context of optimization-based controllers through the use of sampling-based methods and supervised learning techniques. We propose to bootstrap the search by learning an optimal value function in order to speed-up the gait planning procedure making it applicable in real-time. To validate our proposed method, we showcase its performance both in simulation and on hardware using a 22 kg electric quadruped robot. The method is assessed on different terrains, under external perturbations, and in comparison to a standard control approach where the gait sequence is fixed a priori.
Trajectory Optimization under Contact Timing Uncertainties
Jul 16, 2024



Most interesting problems in robotics (e.g., locomotion and manipulation) are realized through intermittent contact with the environment. Due to the perception and modeling errors, assuming an exact time for establishing contact with the environment is unrealistic. On the other hand, handling uncertainties in contact timing is notoriously difficult as it gives rise to either handling uncertain complementarity systems or solving combinatorial optimization problems at run-time. This work presents a novel optimal control formulation to find robust control policies under contact timing uncertainties. Our main novelty lies in casting the stochastic problem to a deterministic optimization over the uncertainty set that ensures robustness criterion satisfaction of candidate pre-contact states and optimizes for contact-relevant objectives. This way, we only need to solve a manageable standard nonlinear programming problem without complementarity constraints or combinatorial explosion. Our simulation results on multiple simplified locomotion and manipulation tasks demonstrate the robustness of our uncertainty-aware formulation compared to the nominal optimal control formulation.
Safe Learning of Locomotion Skills from MPC
Jul 16, 2024Safe learning of locomotion skills is still an open problem. Indeed, the intrinsically unstable nature of the open-loop dynamics of locomotion systems renders naive learning from scratch prone to catastrophic failures in the real world. In this work, we investigate the use of iterative algorithms to safely learn locomotion skills from model predictive control (MPC). In our framework, we use MPC as an expert and take inspiration from the safe data aggregation (SafeDAGGER) framework to minimize the number of failures during training of the policy. Through a comparison with other standard approaches such as behavior cloning and vanilla DAGGER, we show that not only our approach has a substantially fewer number of failures during training, but the resulting policy is also more robust to external disturbances.
Learning feasible transitions for efficient contact planning
Jul 16, 2024Contact planning for legged robots in extremely constrained environments is challenging. The main difficulty stems from the mixed nature of the problem, discrete search together with continuous trajectory optimization. To speed up the discrete search problem, we propose in this paper to learn the properties of transitions from one contact mode to the next. In particular, we learn a feasibility classifier and an offset network; the former predicts if a potential next contact state is feasible from the current contact state, while the latter learns to compensate for misalignment in achieving a desired contact state due to imperfections of the low-level control. We integrate these learned networks in a Monte Carlo Tree Search (MCTS) contact planner to better prune the tree and improve the heuristic. Our simulation results demonstrate that training these networks with offline data significantly speeds up the online search process and improves its accuracy.
Learning-based legged locomotion; state of the art and future perspectives
Jun 03, 2024Legged locomotion holds the premise of universal mobility, a critical capability for many real-world robotic applications. Both model-based and learning-based approaches have advanced the field of legged locomotion in the past three decades. In recent years, however, a number of factors have dramatically accelerated progress in learning-based methods, including the rise of deep learning, rapid progress in simulating robotic systems, and the availability of high-performance and affordable hardware. This article aims to give a brief history of the field, to summarize recent efforts in learning locomotion skills for quadrupeds, and to provide researchers new to the area with an understanding of the key issues involved. With the recent proliferation of humanoid robots, we further outline the rapid rise of analogous methods for bipedal locomotion. We conclude with a discussion of open problems as well as related societal impact.
Efficient Search and Learning for Agile Locomotion on Stepping Stones
Mar 06, 2024



Legged robots have become capable of performing highly dynamic maneuvers in the past few years. However, agile locomotion in highly constrained environments such as stepping stones is still a challenge. In this paper, we propose a combination of model-based control, search, and learning to design efficient control policies for agile locomotion on stepping stones. In our framework, we use nonlinear model predictive control (NMPC) to generate whole-body motions for a given contact plan. To efficiently search for an optimal contact plan, we propose to use Monte Carlo tree search (MCTS). While the combination of MCTS and NMPC can quickly find a feasible plan for a given environment (a few seconds), it is not yet suitable to be used as a reactive policy. Hence, we generate a dataset for optimal goal-conditioned policy for a given scene and learn it through supervised learning. In particular, we leverage the power of diffusion models in handling multi-modality in the dataset. We test our proposed framework on a scenario where our quadruped robot Solo12 successfully jumps to different goals in a highly constrained environment.
Multi-contact Stochastic Predictive Control for Legged Robots with Contact Locations Uncertainty
Sep 08, 2023



Trajectory optimization under uncertainties is a challenging problem for robots in contact with the environment. Such uncertainties are inevitable due to estimation errors, control imperfections, and model mismatches between planning models used for control and the real robot dynamics. This induces control policies that could violate the contact location constraints by making contact at unintended locations, and as a consequence leading to unsafe motion plans. This work addresses the problem of robust kino-dynamic whole-body trajectory optimization using stochastic nonlinear model predictive control (SNMPC) by considering additive uncertainties on the model dynamics subject to contact location chance-constraints as a function of robot's full kinematics. We demonstrate the benefit of using SNMPC over classic nonlinear MPC (NMPC) for whole-body trajectory optimization in terms of contact location constraint satisfaction (safety). We run extensive Monte-Carlo simulations for a quadruped robot performing agile trotting and bounding motions over small stepping stones, where contact location satisfaction becomes critical. Our results show that SNMPC is able to perform all motions safely with 100% success rate, while NMPC failed 48.3% of all motions.
Visual-Inertial and Leg Odometry Fusion for Dynamic Locomotion
Oct 10, 2022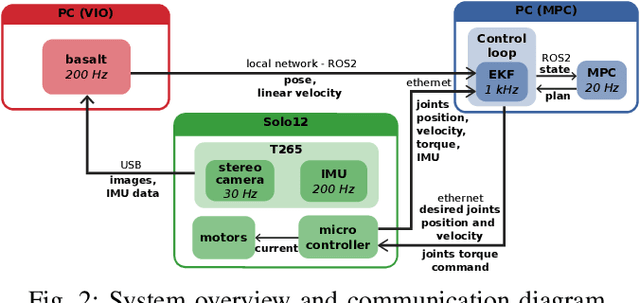
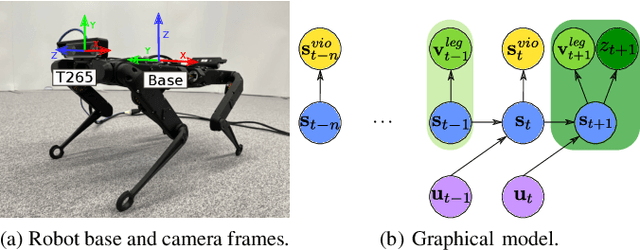
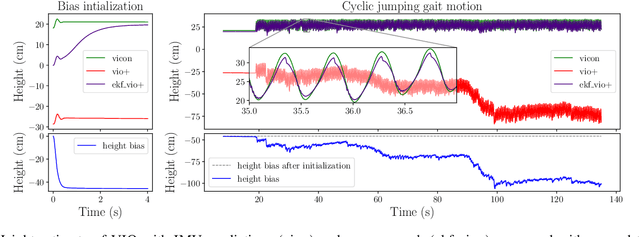
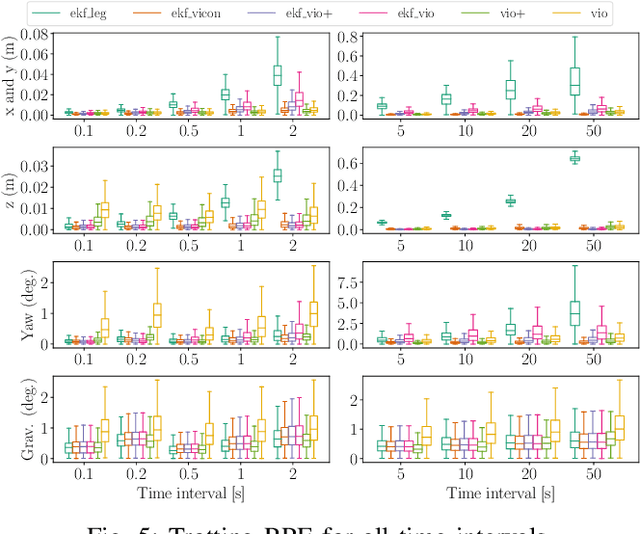
Implementing dynamic locomotion behaviors on legged robots requires a high-quality state estimation module. Especially when the motion includes flight phases, state-of-the-art approaches fail to produce reliable estimation of the robot posture, in particular base height. In this paper, we propose a novel approach for combining visual-inertial odometry (VIO) with leg odometry in an extended Kalman filter (EKF) based state estimator. The VIO module uses a stereo camera and IMU to yield low-drift 3D position and yaw orientation and drift-free pitch and roll orientation of the robot base link in the inertial frame. However, these values have a considerable amount of latency due to image processing and optimization, while the rate of update is quite low which is not suitable for low-level control. To reduce the latency, we predict the VIO state estimate at the rate of the IMU measurements of the VIO sensor. The EKF module uses the base pose and linear velocity predicted by VIO, fuses them further with a second high-rate IMU and leg odometry measurements, and produces robot state estimates with a high frequency and small latency suitable for control. We integrate this lightweight estimation framework with a nonlinear model predictive controller and show successful implementation of a set of agile locomotion behaviors, including trotting and jumping at varying horizontal speeds, on a torque-controlled quadruped robot.