 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisuo-Tactile Object Pose Estimation for a Multi-Finger Robot Hand with Low-Resolution In-Hand Tactile Sensing
Mar 25, 2025



Accurate 3D pose estimation of grasped objects is an important prerequisite for robots to perform assembly or in-hand manipulation tasks, but object occlusion by the robot's own hand greatly increases the difficulty of this perceptual task. Here, we propose that combining visual information and proprioception with binary, low-resolution tactile contact measurements from across the interior surface of an articulated robotic hand can mitigate this issue. The visuo-tactile object-pose-estimation problem is formulated probabilistically in a factor graph. The pose of the object is optimized to align with the three kinds of measurements using a robust cost function to reduce the influence of visual or tactile outlier readings. The advantages of the proposed approach are first demonstrated in simulation: a custom 15-DoF robot hand with one binary tactile sensor per link grasps 17 YCB objects while observed by an RGB-D camera. This low-resolution in-hand tactile sensing significantly improves object-pose estimates under high occlusion and also high visual noise. We also show these benefits through grasping tests with a preliminary real version of our tactile hand, obtaining reasonable visuo-tactile estimates of object pose at approximately 13.3 Hz on average.
Visual-Inertial and Leg Odometry Fusion for Dynamic Locomotion
Oct 10, 2022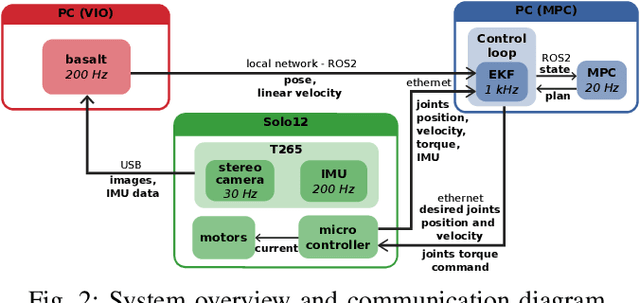
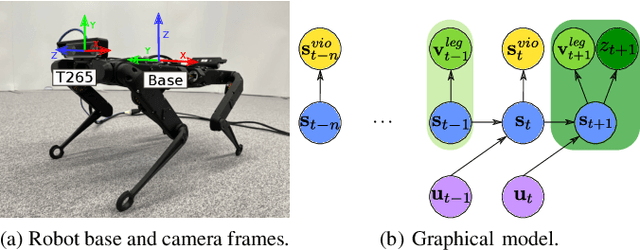
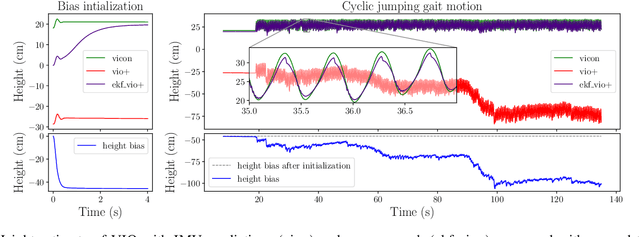
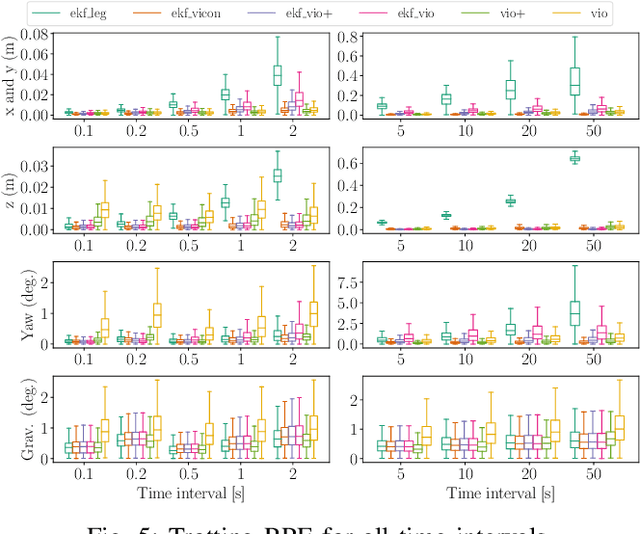
Implementing dynamic locomotion behaviors on legged robots requires a high-quality state estimation module. Especially when the motion includes flight phases, state-of-the-art approaches fail to produce reliable estimation of the robot posture, in particular base height. In this paper, we propose a novel approach for combining visual-inertial odometry (VIO) with leg odometry in an extended Kalman filter (EKF) based state estimator. The VIO module uses a stereo camera and IMU to yield low-drift 3D position and yaw orientation and drift-free pitch and roll orientation of the robot base link in the inertial frame. However, these values have a considerable amount of latency due to image processing and optimization, while the rate of update is quite low which is not suitable for low-level control. To reduce the latency, we predict the VIO state estimate at the rate of the IMU measurements of the VIO sensor. The EKF module uses the base pose and linear velocity predicted by VIO, fuses them further with a second high-rate IMU and leg odometry measurements, and produces robot state estimates with a high frequency and small latency suitable for control. We integrate this lightweight estimation framework with a nonlinear model predictive controller and show successful implementation of a set of agile locomotion behaviors, including trotting and jumping at varying horizontal speeds, on a torque-controlled quadruped robot.