 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLoad-Based Variable Transmission Mechanism for Robotic Applications
Dec 17, 2025This paper presents a Load-Based Variable Transmission (LBVT) mechanism designed to enhance robotic actuation by dynamically adjusting the transmission ratio in response to external torque demands. Unlike existing variable transmission systems that require additional actuators for active control, the proposed LBVT mechanism leverages a pre-tensioned spring and a four-bar linkage to passively modify the transmission ratio, thereby reducing the complexity of robot joint actuation systems. The effectiveness of the LBVT mechanism is evaluated through simulation-based analyses. The results confirm that the system achieves up to a 40 percent increase in transmission ratio upon reaching a predefined torque threshold, effectively amplifying joint torque when required without additional actuation. Furthermore, the simulations demonstrate a torque amplification effect triggered when the applied force exceeds 18 N, highlighting the system ability to autonomously respond to varying load conditions. This research contributes to the development of lightweight, efficient, and adaptive transmission systems for robotic applications, particularly in legged robots where dynamic torque adaptation is critical.
Towards Proprioceptive Terrain Mapping with Quadruped Robots for Exploration in Planetary Permanently Shadowed Regions
Oct 21, 2025



Permanently Shadowed Regions (PSRs) near the lunar poles are of interest for future exploration due to their potential to contain water ice and preserve geological records. Their complex, uneven terrain favors the use of legged robots, which can traverse challenging surfaces while collecting in-situ data, and have proven effective in Earth analogs, including dark caves, when equipped with onboard lighting. While exteroceptive sensors like cameras and lidars can capture terrain geometry and even semantic information, they cannot quantify its physical interaction with the robot, a capability provided by proprioceptive sensing. We propose a terrain mapping framework for quadruped robots, which estimates elevation, foot slippage, energy cost, and stability margins from internal sensing during locomotion. These metrics are incrementally integrated into a multi-layer 2.5D gridmap that reflects terrain interaction from the robot's perspective. The system is evaluated in a simulator that mimics a lunar environment, using the 21 kg quadruped robot Aliengo, showing consistent mapping performance under lunar gravity and terrain conditions.
CroSTAta: Cross-State Transition Attention Transformer for Robotic Manipulation
Oct 01, 2025Learning robotic manipulation policies through supervised learning from demonstrations remains challenging when policies encounter execution variations not explicitly covered during training. While incorporating historical context through attention mechanisms can improve robustness, standard approaches process all past states in a sequence without explicitly modeling the temporal structure that demonstrations may include, such as failure and recovery patterns. We propose a Cross-State Transition Attention Transformer that employs a novel State Transition Attention (STA) mechanism to modulate standard attention weights based on learned state evolution patterns, enabling policies to better adapt their behavior based on execution history. Our approach combines this structured attention with temporal masking during training, where visual information is randomly removed from recent timesteps to encourage temporal reasoning from historical context. Evaluation in simulation shows that STA consistently outperforms standard cross-attention and temporal modeling approaches like TCN and LSTM networks across all tasks, achieving more than 2x improvement over cross-attention on precision-critical tasks.
Primal-Dual iLQR for GPU-Accelerated Learning and Control in Legged Robots
Jun 09, 2025This paper introduces a novel Model Predictive Control (MPC) implementation for legged robot locomotion that leverages GPU parallelization. Our approach enables both temporal and state-space parallelization by incorporating a parallel associative scan to solve the primal-dual Karush-Kuhn-Tucker (KKT) system. In this way, the optimal control problem is solved in $\mathcal{O}(n\log{N} + m)$ complexity, instead of $\mathcal{O}(N(n + m)^3)$, where $n$, $m$, and $N$ are the dimension of the system state, control vector, and the length of the prediction horizon. We demonstrate the advantages of this implementation over two state-of-the-art solvers (acados and crocoddyl), achieving up to a 60\% improvement in runtime for Whole Body Dynamics (WB)-MPC and a 700\% improvement for Single Rigid Body Dynamics (SRBD)-MPC when varying the prediction horizon length. The presented formulation scales efficiently with the problem state dimensions as well, enabling the definition of a centralized controller for up to 16 legged robots that can be computed in less than 25 ms. Furthermore, thanks to the JAX implementation, the solver supports large-scale parallelization across multiple environments, allowing the possibility of performing learning with the MPC in the loop directly in GPU.
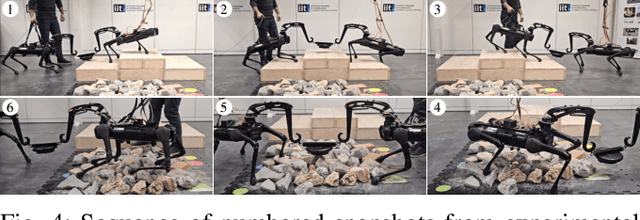
Non-Gaited Legged Locomotion with Monte-Carlo Tree Search and Supervised Learning
Aug 14, 2024


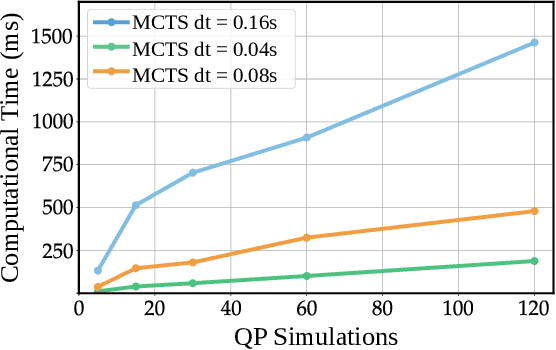
Legged robots are able to navigate complex terrains by continuously interacting with the environment through careful selection of contact sequences and timings. However, the combinatorial nature behind contact planning hinders the applicability of such optimization problems on hardware. In this work, we present a novel approach that optimizes gait sequences and respective timings for legged robots in the context of optimization-based controllers through the use of sampling-based methods and supervised learning techniques. We propose to bootstrap the search by learning an optimal value function in order to speed-up the gait planning procedure making it applicable in real-time. To validate our proposed method, we showcase its performance both in simulation and on hardware using a 22 kg electric quadruped robot. The method is assessed on different terrains, under external perturbations, and in comparison to a standard control approach where the gait sequence is fixed a priori.
PACC: A Passive-Arm Approach for High-Payload Collaborative Carrying with Quadruped Robots Using Model Predictive Control
Mar 28, 2024


In this paper, we introduce the concept of using passive arm structures with intrinsic impedance for robot-robot and human-robot collaborative carrying with quadruped robots. The concept is meant for a leader-follower task and takes a minimalist approach that focuses on exploiting the robots' payload capabilities and reducing energy consumption, without compromising the robot locomotion capabilities. We introduce a preliminary arm mechanical design and describe how to use its joint displacements to guide the robot's motion. To control the robot's locomotion, we propose a decentralized Model Predictive Controller that incorporates an approximation of the arm dynamics and the estimation of the external forces from the collaborative carrying. We validate the overall system experimentally by performing both robot-robot and human-robot collaborative carrying on a stair-like obstacle and on rough terrain.
Accelerating Model Predictive Control for Legged Robots through Distributed Optimization
Mar 27, 2024



This paper presents a novel approach to enhance Model Predictive Control (MPC) for legged robots through Distributed Optimization. Our method focuses on decomposing the robot dynamics into smaller, parallelizable subsystems, and utilizing the Alternating Direction Method of Multipliers (ADMM) to ensure consensus among them. Each subsystem is managed by its own Optimal Control Problem, with ADMM facilitating consistency between their optimizations. This approach not only decreases the computational time but also allows for effective scaling with more complex robot configurations, facilitating the integration of additional subsystems such as articulated arms on a quadruped robot. We demonstrate, through numerical evaluations, the convergence of our approach on two systems with increasing complexity. In addition, we showcase that our approach converges towards the same solution when compared to a state-of-the-art centralized whole-body MPC implementation. Moreover, we quantitatively compare the computational efficiency of our method to the centralized approach, revealing up to a 75\% reduction in computational time. Overall, our approach offers a promising avenue for accelerating MPC solutions for legged robots, paving the way for more effective utilization of the computational performance of modern hardware.
Fast Convex Visual Foothold Adaptation for Quadrupedal Locomotion
Jul 27, 2023This extended abstract provides a short introduction on our recently developed perception-based controller for quadrupedal locomotion. Compared to our previous approach based on Visual Foothold Adaptation (VFA) and Model Predictive Control (MPC), our new framework combines a fast approximation of the safe foothold regions based on Neural Network regression, followed by a convex decomposition routine in order to generate safe landing areas where the controller can freely optimize the footholds location. The aforementioned framework, which combines prediction, convex decomposition, and MPC solution, is tested in simulation on our 140kg hydraulic quadruped robot (HyQReal).
SafeSteps: Learning Safer Footstep Planning Policies for Legged Robots via Model-Based Priors
Jul 24, 2023We present a footstep planning policy for quadrupedal locomotion that is able to directly take into consideration a-priori safety information in its decisions. At its core, a learning process analyzes terrain patches, classifying each landing location by its kinematic feasibility, shin collision, and terrain roughness. This information is then encoded into a small vector representation and passed as an additional state to the footstep planning policy, which furthermore proposes only safe footstep location by applying a masked variant of the Proximal Policy Optimization (PPO) algorithm. The performance of the proposed approach is shown by comparative simulations on an electric quadruped robot walking in different rough terrain scenarios. We show that violations of the above safety conditions are greatly reduced both during training and the successive deployment of the policy, resulting in an inherently safer footstep planner. Furthermore, we show how, as a byproduct, fewer reward terms are needed to shape the behavior of the policy, which in return is able to achieve both better final performances and sample efficiency
Quadrupedal Footstep Planning using Learned Motion Models of a Black-Box Controller
Jul 23, 2023Legged robots are increasingly entering new domains and applications, including search and rescue, inspection, and logistics. However, for such systems to be valuable in real-world scenarios, they must be able to autonomously and robustly navigate irregular terrains. In many cases, robots that are sold on the market do not provide such abilities, being able to perform only blind locomotion. Furthermore, their controller cannot be easily modified by the end-user, requiring a new and time-consuming control synthesis. In this work, we present a fast local motion planning pipeline that extends the capabilities of a black-box walking controller that is only able to track high-level reference velocities. More precisely, we learn a set of motion models for such a controller that maps high-level velocity commands to Center of Mass (CoM) and footstep motions. We then integrate these models with a variant of the A star algorithm to plan the CoM trajectory, footstep sequences, and corresponding high-level velocity commands based on visual information, allowing the quadruped to safely traverse irregular terrains at demand.