 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLineRides: Line-Guided Reinforcement Learning for Bicycle Robot Stunts
May 06, 2026Designing reward functions for agile robotic maneuvers in reinforcement learning remains difficult, and demonstration-based approaches often require reference motions that are unavailable for novel platforms or extreme stunts. We present LineRides, a line-guided learning framework that enables a custom bicycle robot to acquire diverse, commandable stunt behaviors from a user-provided spatial guideline and sparse key-orientations, without demonstrations or explicit timing. LineRides handles physically infeasible guidelines using a tracking margin that permits controlled deviation, resolves temporal ambiguity by measuring progress via traveled distance along the guideline, and disambiguates motion details through position- and sequence-based key-orientations. We evaluate LineRides on the Ultra Mobility Vehicle (UMV) and show that the policy trained with our methods supports seamless transitions between normal driving and stunt execution, enabling five distinct stunts on command: MiniHop, LargeHop, ThreePointTurn, Backflip, and DriftTurn.
Flip Stunts on Bicycle Robots using Iterative Motion Imitation
Mar 30, 2026This work demonstrates a front-flip on bicycle robots via reinforcement learning, particularly by imitating reference motions that are infeasible and imperfect. To address this, we propose Iterative Motion Imitation(IMI), a method that iteratively imitates trajectories generated by prior policy rollouts. Starting from an initial reference that is kinematically or dynamically infeasible, IMI helps train policies that lead to feasible and agile behaviors. We demonstrate our method on Ultra-Mobility Vehicle (UMV), a bicycle robot that is designed to enable agile behaviors. From a self-colliding table-to-ground flip reference generated by a model-based controller, we are able to train policies that enable ground-to-ground and ground-to-table front-flips. We show that compared to a single-shot motion imitation, IMI results in policies with higher success rates and can transfer robustly to the real world. To our knowledge, this is the first unassisted acrobatic flip behavior on such a platform.
System Design of the Ultra Mobility Vehicle: A Driving, Balancing, and Jumping Bicycle Robot
Feb 25, 2026Trials cyclists and mountain bike riders can hop, jump, balance, and drive on one or both wheels. This versatility allows them to achieve speed and energy-efficiency on smooth terrain and agility over rough terrain. Inspired by these athletes, we present the design and control of a robotic platform, Ultra Mobility Vehicle (UMV), which combines a bicycle and a reaction mass to move dynamically with minimal actuated degrees of freedom. We employ a simulation-driven design optimization process to synthesize a spatial linkage topology with a focus on vertical jump height and momentum-based balancing on a single wheel contact. Using a constrained Reinforcement Learning (RL) framework, we demonstrate zero-shot transfer of diverse athletic behaviors, including track-stands, jumps, wheelies, rear wheel hopping, and front flips. This 23.5 kg robot is capable of high speeds (8 m/s) and jumping on and over large obstacles (1 m tall, or 130% of the robot's nominal height).
Reinforcement Learning for Legged Robots: Motion Imitation from Model-Based Optimal Control
May 18, 2023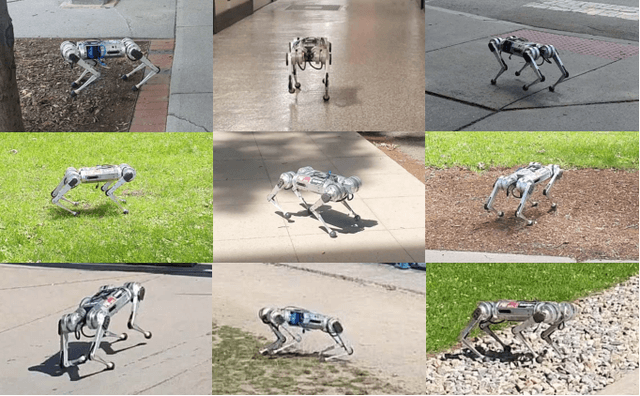

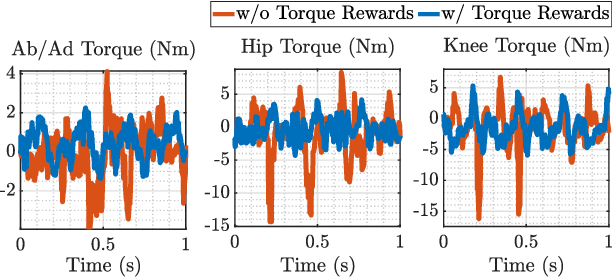
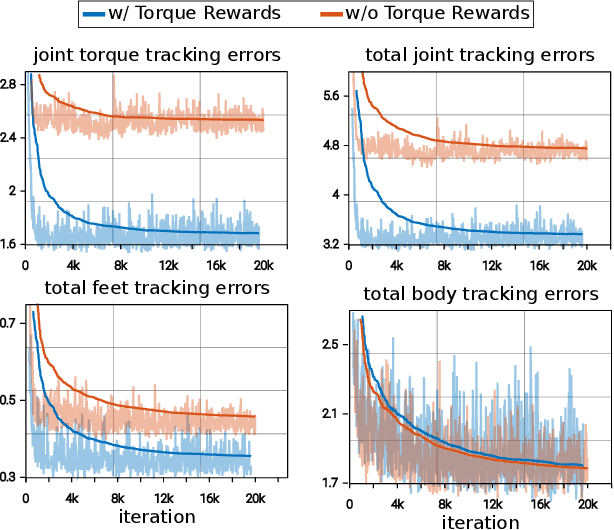
We propose MIMOC: Motion Imitation from Model-Based Optimal Control. MIMOC is a Reinforcement Learning (RL) controller that learns agile locomotion by imitating reference trajectories from model-based optimal control. MIMOC mitigates challenges faced by other motion imitation RL approaches because the references are dynamically consistent, require no motion retargeting, and include torque references. Hence, MIMOC does not require fine-tuning. MIMOC is also less sensitive to modeling and state estimation inaccuracies than model-based controllers. We validate MIMOC on the Mini-Cheetah in outdoor environments over a wide variety of challenging terrain, and on the MIT Humanoid in simulation. We show cases where MIMOC outperforms model-based optimal controllers, and show that imitating torque references improves the policy's performance.
ViTAL: Vision-Based Terrain-Aware Locomotion for Legged Robots
Dec 02, 2022



This work is on vision-based planning strategies for legged robots that separate locomotion planning into foothold selection and pose adaptation. Current pose adaptation strategies optimize the robot's body pose relative to given footholds. If these footholds are not reached, the robot may end up in a state with no reachable safe footholds. Therefore, we present a Vision-Based Terrain-Aware Locomotion (ViTAL) strategy that consists of novel pose adaptation and foothold selection algorithms. ViTAL introduces a different paradigm in pose adaptation that does not optimize the body pose relative to given footholds, but the body pose that maximizes the chances of the legs in reaching safe footholds. ViTAL plans footholds and poses based on skills that characterize the robot's capabilities and its terrain-awareness. We use the 90 kg HyQ and 140 kg HyQReal quadruped robots to validate ViTAL, and show that they are able to climb various obstacles including stairs, gaps, and rough terrains at different speeds and gaits. We compare ViTAL with a baseline strategy that selects the robot pose based on given selected footholds, and show that ViTAL outperforms the baseline.
On Terrain-Aware Locomotion for Legged Robots
Dec 01, 2022(Simplified Abstract) To accomplish breakthroughs in dynamic whole-body locomotion, legged robots have to be terrain aware. Terrain-Aware Locomotion (TAL) implies that the robot can perceive the terrain with its sensors, and can take decisions based on this information. This thesis presents TAL strategies both from a proprioceptive and an exteroceptive perspective. The strategies are implemented at the level of locomotion planning, control, and state estimation, and using optimization and learning techniques. The first part is on TAL strategies at the Whole-Body Control (WBC) level. We introduce a passive WBC (pWBC) framework that allows the robot to stabilize and walk over challenging terrain while taking into account the terrain geometry (inclination) and friction properties. The pWBC relies on rigid contact assumptions which makes it suitable only for stiff terrain. As a consequence, we introduce Soft Terrain Adaptation aNd Compliance Estimation (STANCE) which is a soft terrain adaptation algorithm that generalizes beyond rigid terrain. The second part of the thesis focuses on vision-based TAL strategies. We present Vision-Based Terrain-Aware Locomotion (ViTAL) which is an online planning strategy that selects the footholds based on the robot capabilities, and the robot pose that maximizes the chances of the robot succeeding in reaching these footholds. ViTAL relies on a set of robot skills that characterizes the capabilities of the robot and its legs. The skills include the robot's ability to assess the terrain's geometry, avoid leg collisions, and avoid reaching kinematic limits. Our strategies are based on optimization and learning methods and are validated on HyQ and HyQReal in simulation and experiment. We show that with the help of these strategies, we can push dynamic legged robots one step closer to being fully autonomous and terrain aware.
On State Estimation for Legged Locomotion over Soft Terrain
Jan 06, 2021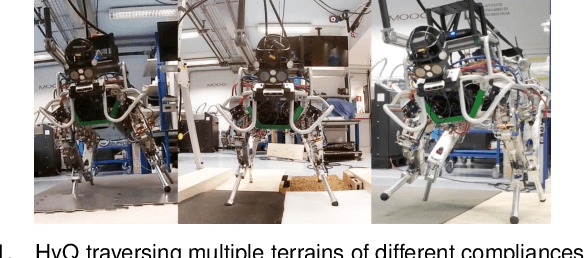
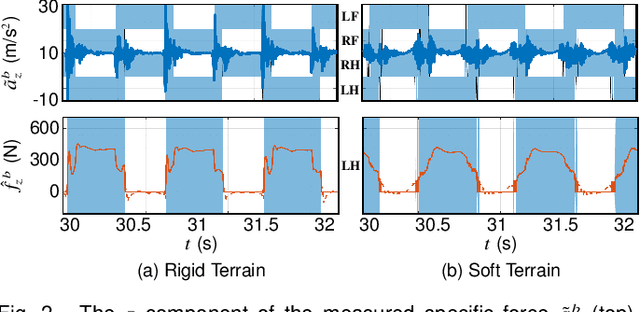
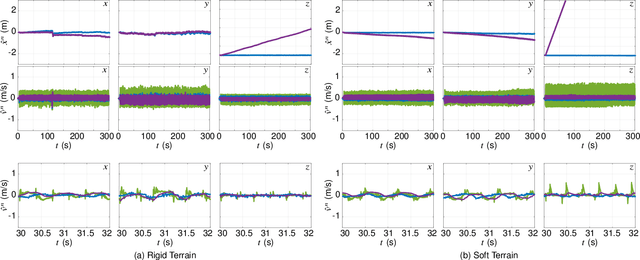
Locomotion over soft terrain remains a challenging problem for legged robots. Most of the work done on state estimation for legged robots is designed for rigid contacts, and does not take into account the physical parameters of the terrain. That said, this letter answers the following questions: how and why does soft terrain affect state estimation for legged robots? To do so, we utilized a state estimator that fuses IMU measurements with leg odometry that is designed with rigid contact assumptions. We experimentally validated the state estimator with the HyQ robot trotting over both soft and rigid terrain. We demonstrate that soft terrain negatively affects state estimation for legged robots, and that the state estimates have a noticeable drift over soft terrain compared to rigid terrain.
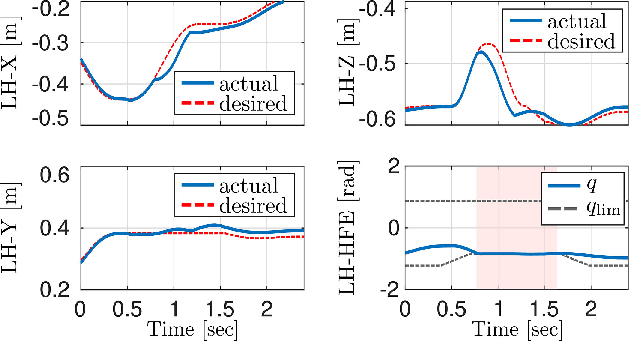
STANCE: Locomotion Adaptation over Soft Terrain
Apr 28, 2019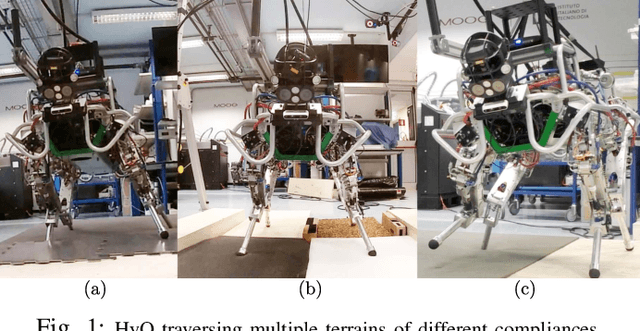
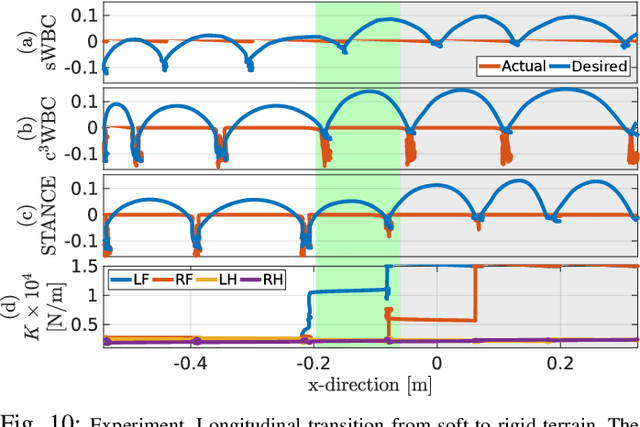
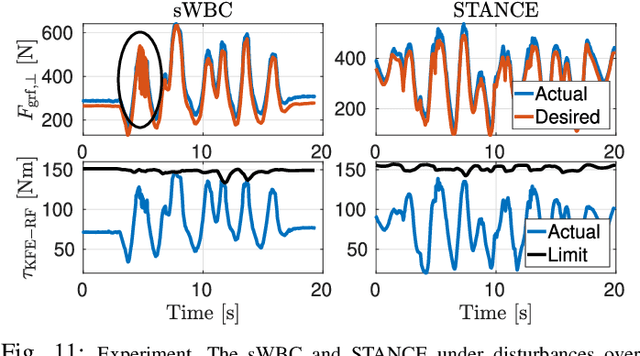
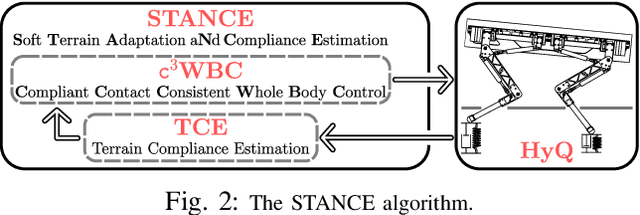
Whole-body Control (WBC) has emerged as an important framework in locomotion control for legged robots. However, most of WBC frameworks fail to generalize beyond rigid terrains. Legged locomotion over soft terrain is difficult due to the presence of unmodeled contact dynamics that WBCs do not account for. This introduces uncertainty in locomotion and affects the stability and performance of the system. In this paper, we propose a novel soft terrain adaptation algorithm called STANCE: Soft Terrain Adaptation and Compliance Estimation. STANCE consists of a WBC that exploits the knowledge of the terrain to generate an optimal solution that is contact consistent and an online terrain compliance estimator that provides the WBC with terrain knowledge. We validated STANCE both in simulation and experiment on the Hydraulically actuated Quadruped (HyQ) robot, and we compared it against the state of the art WBC. We demonstrated the capabilities of STANCE with multiple terrains of different compliances, aggressive maneuvers, different forward velocities, and external disturbances. STANCE allowed HyQ to adapt online to terrains with different compliances (rigid and soft) without pre-tuning. HyQ was able to successfully deal with the transition between different terrains and showed the ability to differentiate between compliances under each foot.
Passive Whole-body Control for Quadruped Robots: Experimental Validation over Challenging Terrain
Mar 13, 2019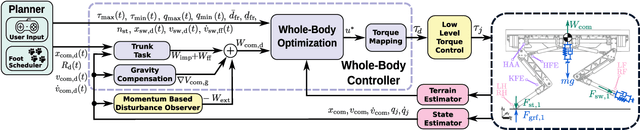
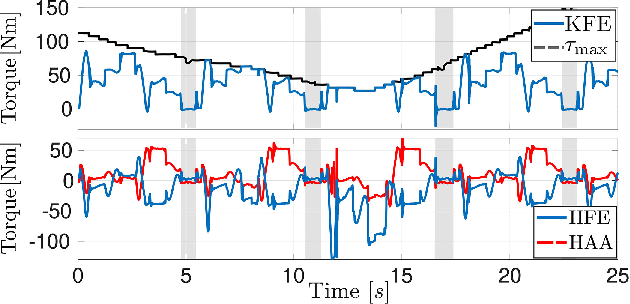
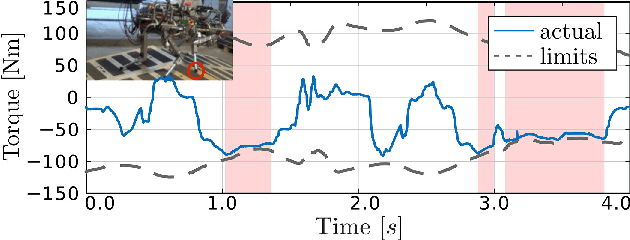
We present experimental results using a passive whole-body control approach for quadruped robots that achieves dynamic locomotion while compliantly balancing the robot's trunk. We formulate the motion tracking as a Quadratic Program (QP) that takes into account the full robot rigid body dynamics, the actuation limits, the joint limits and the contact interaction. We analyze the controller's robustness against inaccurate friction coefficient estimates and unstable footholds, as well as its capability to redistribute the load as a consequence of enforcing actuation limits. Additionally, we present practical implementation details gained from the experience with the real platform. Extensive experimental trials on the 90 kg Hydraulically actuated Quadruped (HyQ) robot validate the capabilities of this controller under various terrain conditions and gaits. The proposed approach is superior for accurate execution of highly dynamic motions with respect to the current state of the art.