 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSTANCE: Locomotion Adaptation over Soft Terrain
Apr 28, 2019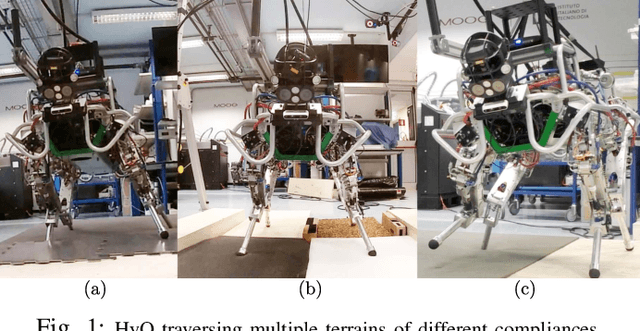
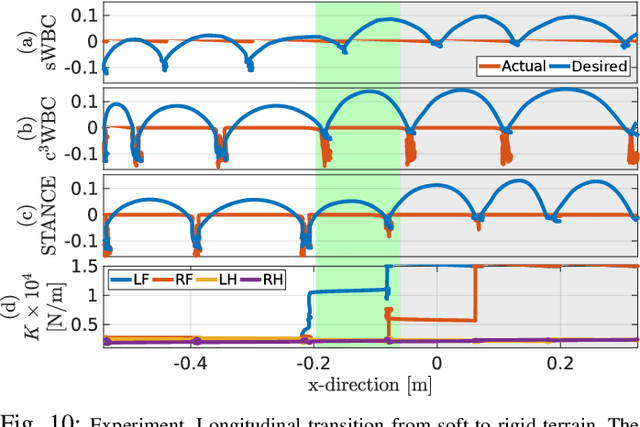
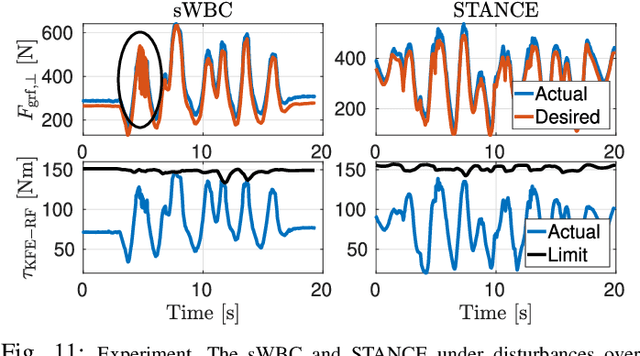
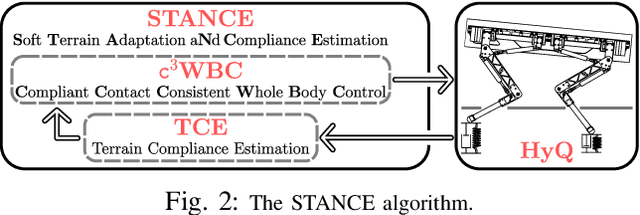
Whole-body Control (WBC) has emerged as an important framework in locomotion control for legged robots. However, most of WBC frameworks fail to generalize beyond rigid terrains. Legged locomotion over soft terrain is difficult due to the presence of unmodeled contact dynamics that WBCs do not account for. This introduces uncertainty in locomotion and affects the stability and performance of the system. In this paper, we propose a novel soft terrain adaptation algorithm called STANCE: Soft Terrain Adaptation and Compliance Estimation. STANCE consists of a WBC that exploits the knowledge of the terrain to generate an optimal solution that is contact consistent and an online terrain compliance estimator that provides the WBC with terrain knowledge. We validated STANCE both in simulation and experiment on the Hydraulically actuated Quadruped (HyQ) robot, and we compared it against the state of the art WBC. We demonstrated the capabilities of STANCE with multiple terrains of different compliances, aggressive maneuvers, different forward velocities, and external disturbances. STANCE allowed HyQ to adapt online to terrains with different compliances (rigid and soft) without pre-tuning. HyQ was able to successfully deal with the transition between different terrains and showed the ability to differentiate between compliances under each foot.
Simultaneous Contact, Gait and Motion Planning for Robust Multi-Legged Locomotion via Mixed-Integer Convex Optimization
Apr 09, 2019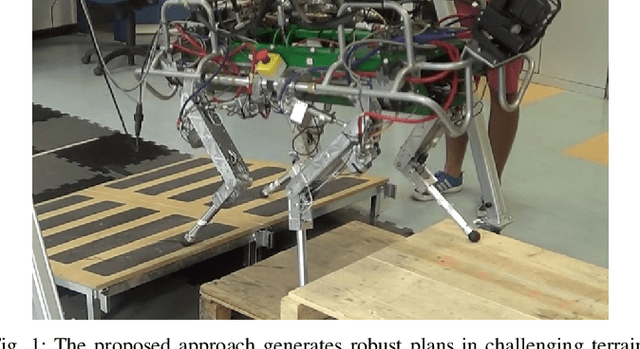
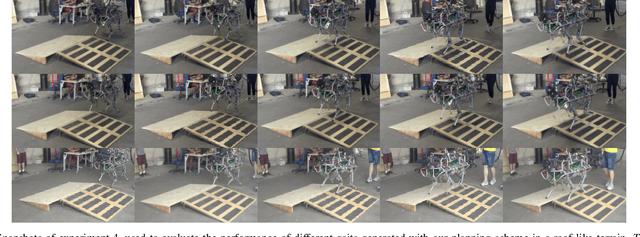
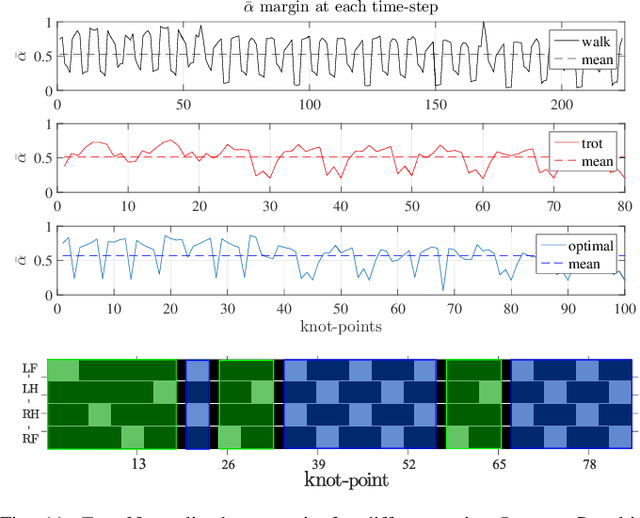
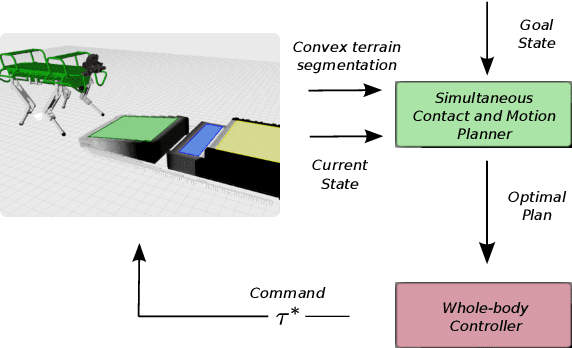
Traditional motion planning approaches for multi-legged locomotion divide the problem into several stages, such as contact search and trajectory generation. However, reasoning about contacts and motions simultaneously is crucial for the generation of complex whole-body behaviors. Currently, coupling theses problems has required either the assumption of a fixed gait sequence and flat terrain condition, or non-convex optimization with intractable computation time. In this paper, we propose a mixed-integer convex formulation to plan simultaneously contact locations, gait transitions and motion, in a computationally efficient fashion. In contrast to previous works, our approach is not limited to flat terrain nor to a pre-specified gait sequence. Instead, we incorporate the friction cone stability margin, approximate the robot's torque limits, and plan the gait using mixed-integer convex constraints. We experimentally validated our approach on the HyQ robot by traversing different challenging terrains, where non-convexity and flat terrain assumptions might lead to sub-optimal or unstable plans. Our method increases the motion generality while keeping a low computation time.