 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Sensor Fusion for Quadruped Robot State Estimation using Invariant Filtering and Smoothing
Apr 29, 2025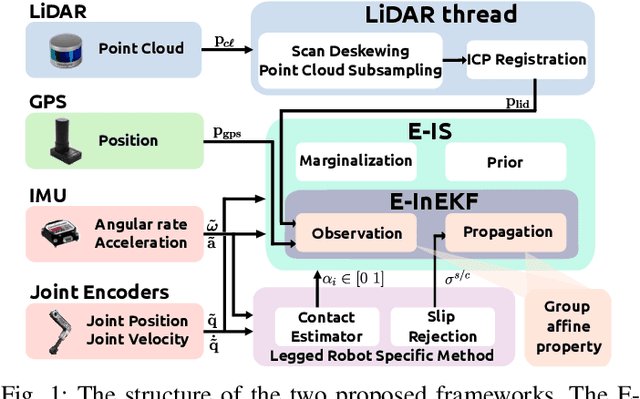

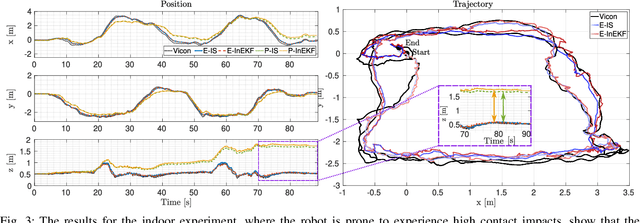
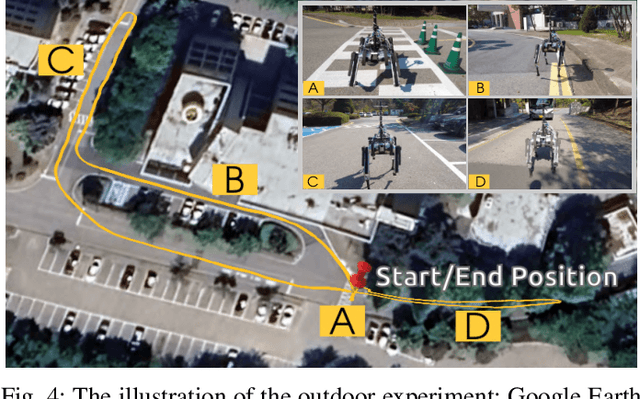
This letter introduces two multi-sensor state estimation frameworks for quadruped robots, built on the Invariant Extended Kalman Filter (InEKF) and Invariant Smoother (IS). The proposed methods, named E-InEKF and E-IS, fuse kinematics, IMU, LiDAR, and GPS data to mitigate position drift, particularly along the z-axis, a common issue in proprioceptive-based approaches. We derived observation models that satisfy group-affine properties to integrate LiDAR odometry and GPS into InEKF and IS. LiDAR odometry is incorporated using Iterative Closest Point (ICP) registration on a parallel thread, preserving the computational efficiency of proprioceptive-based state estimation. We evaluate E-InEKF and E-IS with and without exteroceptive sensors, benchmarking them against LiDAR-based odometry methods in indoor and outdoor experiments using the KAIST HOUND2 robot. Our methods achieve lower Relative Position Errors (RPE) and significantly reduce Absolute Trajectory Error (ATE), with improvements of up to 28% indoors and 40% outdoors compared to LIO-SAM and FAST-LIO2. Additionally, we compare E-InEKF and E-IS in terms of computational efficiency and accuracy.
MUSE: A Real-Time Multi-Sensor State Estimator for Quadruped Robots
Mar 15, 2025
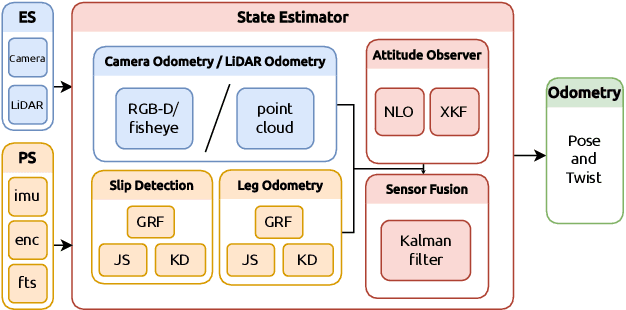
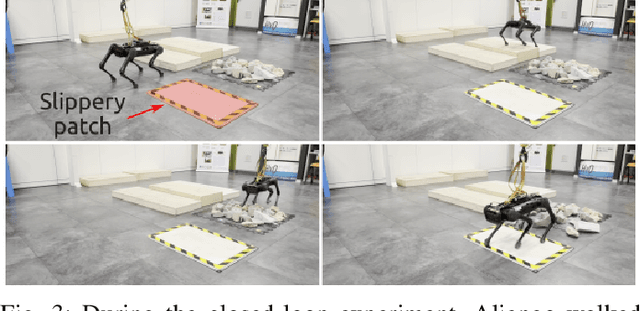
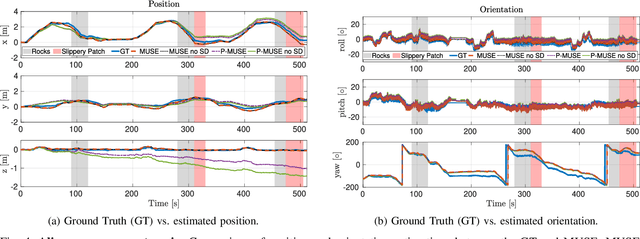
This paper introduces an innovative state estimator, MUSE (MUlti-sensor State Estimator), designed to enhance state estimation's accuracy and real-time performance in quadruped robot navigation. The proposed state estimator builds upon our previous work presented in [1]. It integrates data from a range of onboard sensors, including IMUs, encoders, cameras, and LiDARs, to deliver a comprehensive and reliable estimation of the robot's pose and motion, even in slippery scenarios. We tested MUSE on a Unitree Aliengo robot, successfully closing the locomotion control loop in difficult scenarios, including slippery and uneven terrain. Benchmarking against Pronto [2] and VILENS [3] showed 67.6% and 26.7% reductions in translational errors, respectively. Additionally, MUSE outperformed DLIO [4], a LiDAR-inertial odometry system in rotational errors and frequency, while the proprioceptive version of MUSE (P-MUSE) outperformed TSIF [5], with a 45.9% reduction in absolute trajectory error (ATE).
On State Estimation for Legged Locomotion over Soft Terrain
Jan 06, 2021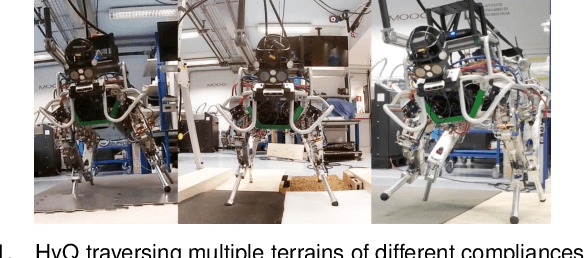
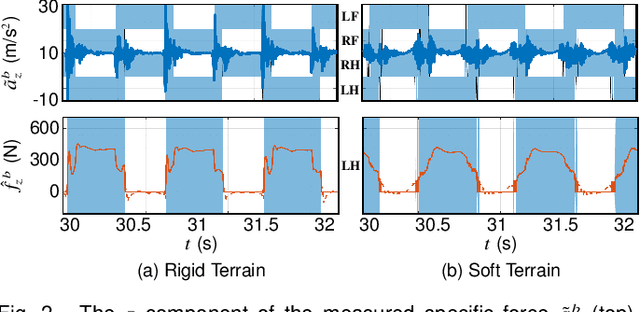
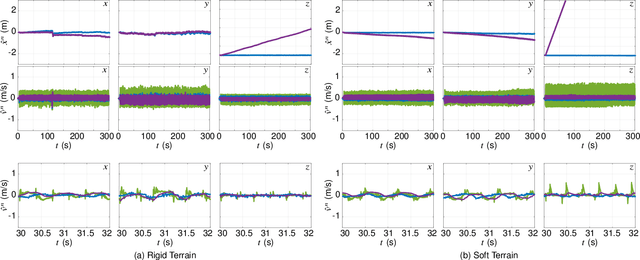
Locomotion over soft terrain remains a challenging problem for legged robots. Most of the work done on state estimation for legged robots is designed for rigid contacts, and does not take into account the physical parameters of the terrain. That said, this letter answers the following questions: how and why does soft terrain affect state estimation for legged robots? To do so, we utilized a state estimator that fuses IMU measurements with leg odometry that is designed with rigid contact assumptions. We experimentally validated the state estimator with the HyQ robot trotting over both soft and rigid terrain. We demonstrate that soft terrain negatively affects state estimation for legged robots, and that the state estimates have a noticeable drift over soft terrain compared to rigid terrain.
STANCE: Locomotion Adaptation over Soft Terrain
Apr 28, 2019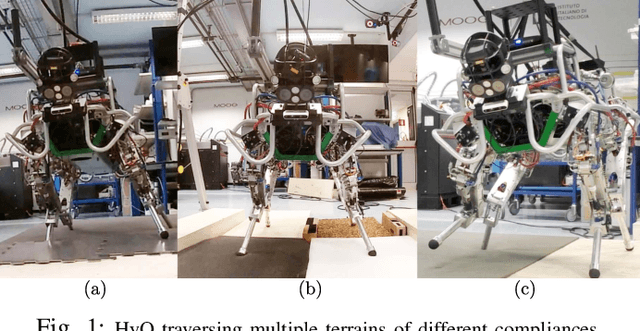
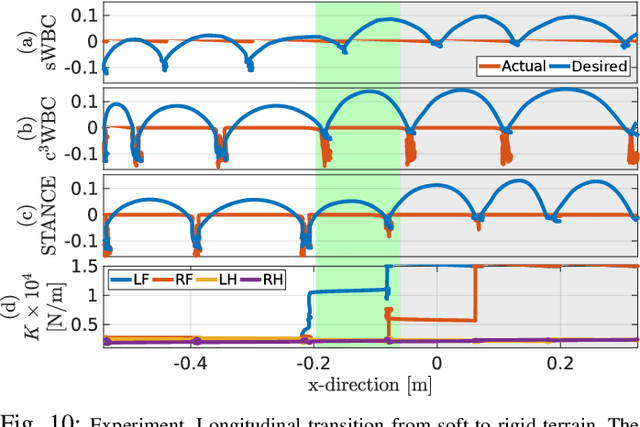
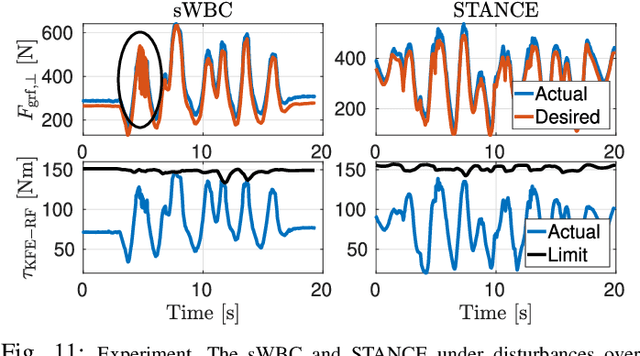
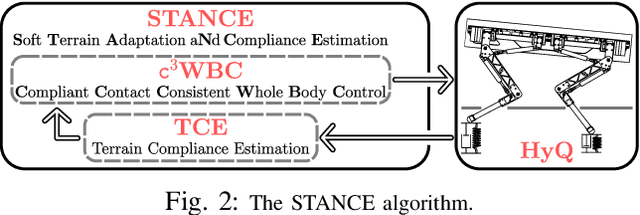
Whole-body Control (WBC) has emerged as an important framework in locomotion control for legged robots. However, most of WBC frameworks fail to generalize beyond rigid terrains. Legged locomotion over soft terrain is difficult due to the presence of unmodeled contact dynamics that WBCs do not account for. This introduces uncertainty in locomotion and affects the stability and performance of the system. In this paper, we propose a novel soft terrain adaptation algorithm called STANCE: Soft Terrain Adaptation and Compliance Estimation. STANCE consists of a WBC that exploits the knowledge of the terrain to generate an optimal solution that is contact consistent and an online terrain compliance estimator that provides the WBC with terrain knowledge. We validated STANCE both in simulation and experiment on the Hydraulically actuated Quadruped (HyQ) robot, and we compared it against the state of the art WBC. We demonstrated the capabilities of STANCE with multiple terrains of different compliances, aggressive maneuvers, different forward velocities, and external disturbances. STANCE allowed HyQ to adapt online to terrains with different compliances (rigid and soft) without pre-tuning. HyQ was able to successfully deal with the transition between different terrains and showed the ability to differentiate between compliances under each foot.