 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLoad-Based Variable Transmission Mechanism for Robotic Applications
Dec 17, 2025This paper presents a Load-Based Variable Transmission (LBVT) mechanism designed to enhance robotic actuation by dynamically adjusting the transmission ratio in response to external torque demands. Unlike existing variable transmission systems that require additional actuators for active control, the proposed LBVT mechanism leverages a pre-tensioned spring and a four-bar linkage to passively modify the transmission ratio, thereby reducing the complexity of robot joint actuation systems. The effectiveness of the LBVT mechanism is evaluated through simulation-based analyses. The results confirm that the system achieves up to a 40 percent increase in transmission ratio upon reaching a predefined torque threshold, effectively amplifying joint torque when required without additional actuation. Furthermore, the simulations demonstrate a torque amplification effect triggered when the applied force exceeds 18 N, highlighting the system ability to autonomously respond to varying load conditions. This research contributes to the development of lightweight, efficient, and adaptive transmission systems for robotic applications, particularly in legged robots where dynamic torque adaptation is critical.
Towards Proprioceptive Terrain Mapping with Quadruped Robots for Exploration in Planetary Permanently Shadowed Regions
Oct 21, 2025



Permanently Shadowed Regions (PSRs) near the lunar poles are of interest for future exploration due to their potential to contain water ice and preserve geological records. Their complex, uneven terrain favors the use of legged robots, which can traverse challenging surfaces while collecting in-situ data, and have proven effective in Earth analogs, including dark caves, when equipped with onboard lighting. While exteroceptive sensors like cameras and lidars can capture terrain geometry and even semantic information, they cannot quantify its physical interaction with the robot, a capability provided by proprioceptive sensing. We propose a terrain mapping framework for quadruped robots, which estimates elevation, foot slippage, energy cost, and stability margins from internal sensing during locomotion. These metrics are incrementally integrated into a multi-layer 2.5D gridmap that reflects terrain interaction from the robot's perspective. The system is evaluated in a simulator that mimics a lunar environment, using the 21 kg quadruped robot Aliengo, showing consistent mapping performance under lunar gravity and terrain conditions.
CroSTAta: Cross-State Transition Attention Transformer for Robotic Manipulation
Oct 01, 2025Learning robotic manipulation policies through supervised learning from demonstrations remains challenging when policies encounter execution variations not explicitly covered during training. While incorporating historical context through attention mechanisms can improve robustness, standard approaches process all past states in a sequence without explicitly modeling the temporal structure that demonstrations may include, such as failure and recovery patterns. We propose a Cross-State Transition Attention Transformer that employs a novel State Transition Attention (STA) mechanism to modulate standard attention weights based on learned state evolution patterns, enabling policies to better adapt their behavior based on execution history. Our approach combines this structured attention with temporal masking during training, where visual information is randomly removed from recent timesteps to encourage temporal reasoning from historical context. Evaluation in simulation shows that STA consistently outperforms standard cross-attention and temporal modeling approaches like TCN and LSTM networks across all tasks, achieving more than 2x improvement over cross-attention on precision-critical tasks.
Guided Reinforcement Learning for Omnidirectional 3D Jumping in Quadruped Robots
Jul 22, 2025Jumping poses a significant challenge for quadruped robots, despite being crucial for many operational scenarios. While optimisation methods exist for controlling such motions, they are often time-consuming and demand extensive knowledge of robot and terrain parameters, making them less robust in real-world scenarios. Reinforcement learning (RL) is emerging as a viable alternative, yet conventional end-to-end approaches lack efficiency in terms of sample complexity, requiring extensive training in simulations, and predictability of the final motion, which makes it difficult to certify the safety of the final motion. To overcome these limitations, this paper introduces a novel guided reinforcement learning approach that leverages physical intuition for efficient and explainable jumping, by combining B\'ezier curves with a Uniformly Accelerated Rectilinear Motion (UARM) model. Extensive simulation and experimental results clearly demonstrate the advantages of our approach over existing alternatives.
Primal-Dual iLQR for GPU-Accelerated Learning and Control in Legged Robots
Jun 09, 2025This paper introduces a novel Model Predictive Control (MPC) implementation for legged robot locomotion that leverages GPU parallelization. Our approach enables both temporal and state-space parallelization by incorporating a parallel associative scan to solve the primal-dual Karush-Kuhn-Tucker (KKT) system. In this way, the optimal control problem is solved in $\mathcal{O}(n\log{N} + m)$ complexity, instead of $\mathcal{O}(N(n + m)^3)$, where $n$, $m$, and $N$ are the dimension of the system state, control vector, and the length of the prediction horizon. We demonstrate the advantages of this implementation over two state-of-the-art solvers (acados and crocoddyl), achieving up to a 60\% improvement in runtime for Whole Body Dynamics (WB)-MPC and a 700\% improvement for Single Rigid Body Dynamics (SRBD)-MPC when varying the prediction horizon length. The presented formulation scales efficiently with the problem state dimensions as well, enabling the definition of a centralized controller for up to 16 legged robots that can be computed in less than 25 ms. Furthermore, thanks to the JAX implementation, the solver supports large-scale parallelization across multiple environments, allowing the possibility of performing learning with the MPC in the loop directly in GPU.
Morphologically Symmetric Reinforcement Learning for Ambidextrous Bimanual Manipulation
May 08, 2025Humans naturally exhibit bilateral symmetry in their gross manipulation skills, effortlessly mirroring simple actions between left and right hands. Bimanual robots-which also feature bilateral symmetry-should similarly exploit this property to perform tasks with either hand. Unlike humans, who often favor a dominant hand for fine dexterous skills, robots should ideally execute ambidextrous manipulation with equal proficiency. To this end, we introduce SYMDEX (SYMmetric DEXterity), a reinforcement learning framework for ambidextrous bi-manipulation that leverages the robot's inherent bilateral symmetry as an inductive bias. SYMDEX decomposes complex bimanual manipulation tasks into per-hand subtasks and trains dedicated policies for each. By exploiting bilateral symmetry via equivariant neural networks, experience from one arm is inherently leveraged by the opposite arm. We then distill the subtask policies into a global ambidextrous policy that is independent of the hand-task assignment. We evaluate SYMDEX on six challenging simulated manipulation tasks and demonstrate successful real-world deployment on two of them. Our approach strongly outperforms baselines on complex task in which the left and right hands perform different roles. We further demonstrate SYMDEX's scalability by extending it to a four-arm manipulation setup, where our symmetry-aware policies enable effective multi-arm collaboration and coordination. Our results highlight how structural symmetry as inductive bias in policy learning enhances sample efficiency, robustness, and generalization across diverse dexterous manipulation tasks.
Multi-Sensor Fusion for Quadruped Robot State Estimation using Invariant Filtering and Smoothing
Apr 29, 2025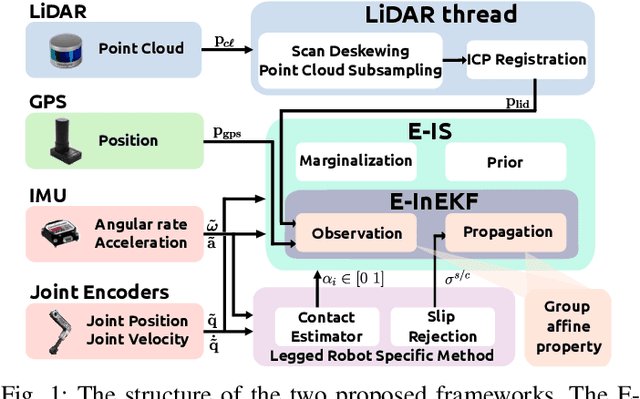

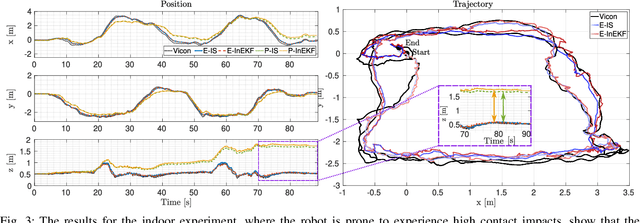
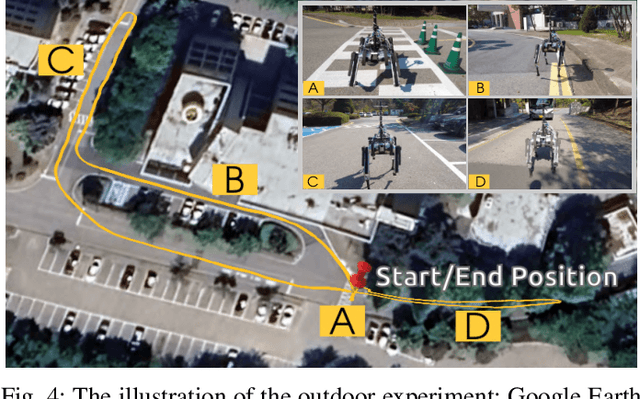
This letter introduces two multi-sensor state estimation frameworks for quadruped robots, built on the Invariant Extended Kalman Filter (InEKF) and Invariant Smoother (IS). The proposed methods, named E-InEKF and E-IS, fuse kinematics, IMU, LiDAR, and GPS data to mitigate position drift, particularly along the z-axis, a common issue in proprioceptive-based approaches. We derived observation models that satisfy group-affine properties to integrate LiDAR odometry and GPS into InEKF and IS. LiDAR odometry is incorporated using Iterative Closest Point (ICP) registration on a parallel thread, preserving the computational efficiency of proprioceptive-based state estimation. We evaluate E-InEKF and E-IS with and without exteroceptive sensors, benchmarking them against LiDAR-based odometry methods in indoor and outdoor experiments using the KAIST HOUND2 robot. Our methods achieve lower Relative Position Errors (RPE) and significantly reduce Absolute Trajectory Error (ATE), with improvements of up to 28% indoors and 40% outdoors compared to LIO-SAM and FAST-LIO2. Additionally, we compare E-InEKF and E-IS in terms of computational efficiency and accuracy.
MUSE: A Real-Time Multi-Sensor State Estimator for Quadruped Robots
Mar 15, 2025
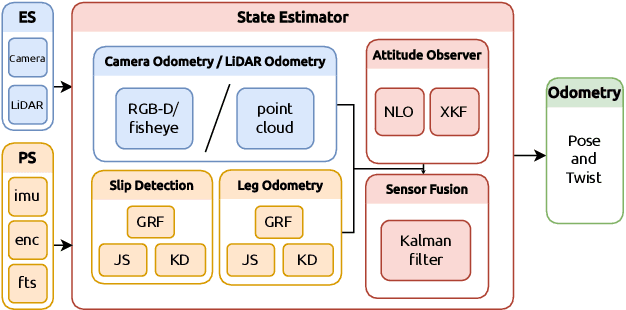
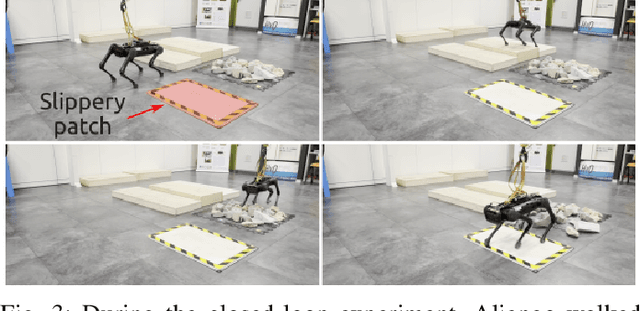
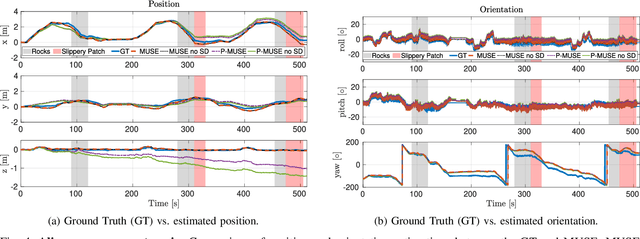
This paper introduces an innovative state estimator, MUSE (MUlti-sensor State Estimator), designed to enhance state estimation's accuracy and real-time performance in quadruped robot navigation. The proposed state estimator builds upon our previous work presented in [1]. It integrates data from a range of onboard sensors, including IMUs, encoders, cameras, and LiDARs, to deliver a comprehensive and reliable estimation of the robot's pose and motion, even in slippery scenarios. We tested MUSE on a Unitree Aliengo robot, successfully closing the locomotion control loop in difficult scenarios, including slippery and uneven terrain. Benchmarking against Pronto [2] and VILENS [3] showed 67.6% and 26.7% reductions in translational errors, respectively. Additionally, MUSE outperformed DLIO [4], a LiDAR-inertial odometry system in rotational errors and frequency, while the proprioceptive version of MUSE (P-MUSE) outperformed TSIF [5], with a 45.9% reduction in absolute trajectory error (ATE).
SANDRO: a Robust Solver with a Splitting Strategy for Point Cloud Registration
Mar 10, 2025


Point cloud registration is a critical problem in computer vision and robotics, especially in the field of navigation. Current methods often fail when faced with high outlier rates or take a long time to converge to a suitable solution. In this work, we introduce a novel algorithm for point cloud registration called SANDRO (Splitting strategy for point cloud Alignment using Non-convex anD Robust Optimization), which combines an Iteratively Reweighted Least Squares (IRLS) framework with a robust loss function with graduated non-convexity. This approach is further enhanced by a splitting strategy designed to handle high outlier rates and skewed distributions of outliers. SANDRO is capable of addressing important limitations of existing methods, as in challenging scenarios where the presence of high outlier rates and point cloud symmetries significantly hinder convergence. SANDRO achieves superior performance in terms of success rate when compared to the state-of-the-art methods, demonstrating a 20% improvement from the current state of the art when tested on the Redwood real dataset and 60% improvement when tested on synthetic data.
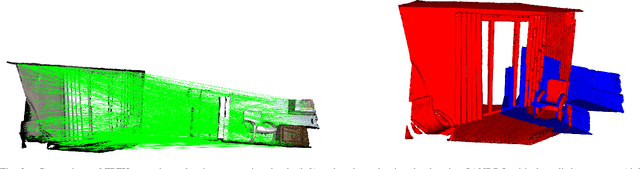
Proprioceptive State Estimation for Quadruped Robots using Invariant Kalman Filtering and Scale-Variant Robust Cost Functions
Oct 07, 2024
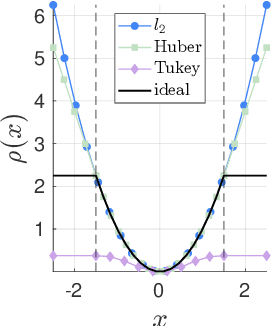

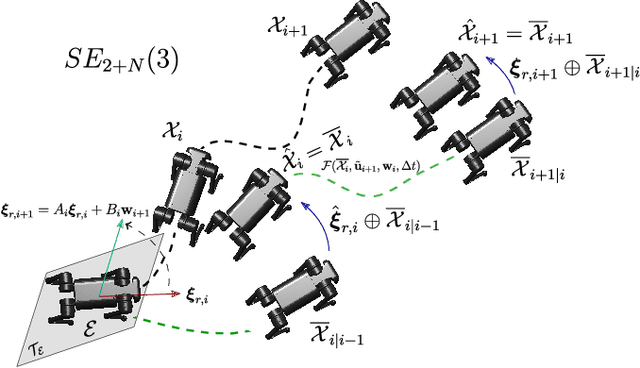
Accurate state estimation is crucial for legged robot locomotion, as it provides the necessary information to allow control and navigation. However, it is also challenging, especially in scenarios with uneven and slippery terrain. This paper presents a new Invariant Extended Kalman filter for legged robot state estimation using only proprioceptive sensors. We formulate the methodology by combining recent advances in state estimation theory with the use of robust cost functions in the measurement update. We tested our methodology on quadruped robots through experiments and public datasets, showing that we can obtain a pose drift up to 40% lower in trajectories covering a distance of over 450m, in comparison with a state-of-the-art Invariant Extended Kalman filter.