 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSANDRO: a Robust Solver with a Splitting Strategy for Point Cloud Registration
Mar 10, 2025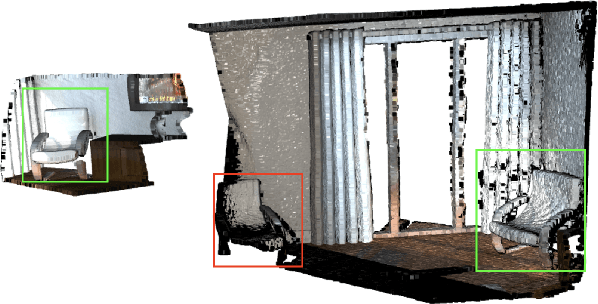
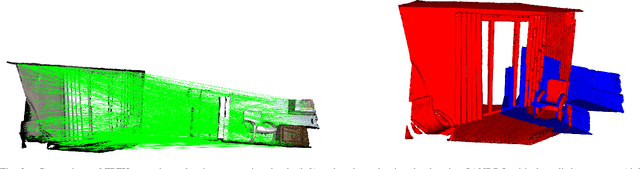


Point cloud registration is a critical problem in computer vision and robotics, especially in the field of navigation. Current methods often fail when faced with high outlier rates or take a long time to converge to a suitable solution. In this work, we introduce a novel algorithm for point cloud registration called SANDRO (Splitting strategy for point cloud Alignment using Non-convex anD Robust Optimization), which combines an Iteratively Reweighted Least Squares (IRLS) framework with a robust loss function with graduated non-convexity. This approach is further enhanced by a splitting strategy designed to handle high outlier rates and skewed distributions of outliers. SANDRO is capable of addressing important limitations of existing methods, as in challenging scenarios where the presence of high outlier rates and point cloud symmetries significantly hinder convergence. SANDRO achieves superior performance in terms of success rate when compared to the state-of-the-art methods, demonstrating a 20% improvement from the current state of the art when tested on the Redwood real dataset and 60% improvement when tested on synthetic data.
Creating a Segmented Pointcloud of Grapevines by Combining Multiple Viewpoints Through Visual Odometry
Aug 29, 2024


Grapevine winter pruning is a labor-intensive and repetitive process that significantly influences the quality and quantity of the grape harvest and produced wine of the following season. It requires a careful and expert detection of the point to be cut. Because of its complexity, repetitive nature and time constraint, the task requires skilled labor that needs to be trained. This extended abstract presents the computer vision pipeline employed in project Vinum, using detectron2 as a segmentation network and keypoint visual odometry to merge different observation into a single pointcloud used to make informed pruning decisions.