 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHITTER: A HumanoId Table TEnnis Robot via Hierarchical Planning and Learning
Aug 28, 2025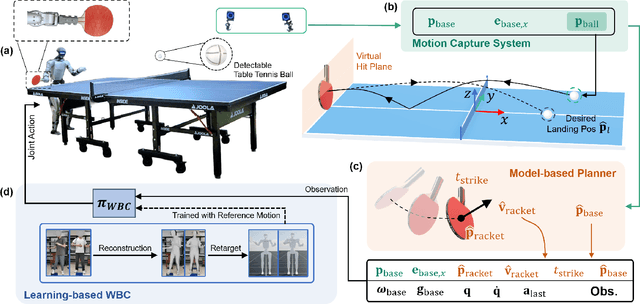
Humanoid robots have recently achieved impressive progress in locomotion and whole-body control, yet they remain constrained in tasks that demand rapid interaction with dynamic environments through manipulation. Table tennis exemplifies such a challenge: with ball speeds exceeding 5 m/s, players must perceive, predict, and act within sub-second reaction times, requiring both agility and precision. To address this, we present a hierarchical framework for humanoid table tennis that integrates a model-based planner for ball trajectory prediction and racket target planning with a reinforcement learning-based whole-body controller. The planner determines striking position, velocity and timing, while the controller generates coordinated arm and leg motions that mimic human strikes and maintain stability and agility across consecutive rallies. Moreover, to encourage natural movements, human motion references are incorporated during training. We validate our system on a general-purpose humanoid robot, achieving up to 106 consecutive shots with a human opponent and sustained exchanges against another humanoid. These results demonstrate real-world humanoid table tennis with sub-second reactive control, marking a step toward agile and interactive humanoid behaviors.
Toward Real-World Cooperative and Competitive Soccer with Quadrupedal Robot Teams
May 20, 2025Achieving coordinated teamwork among legged robots requires both fine-grained locomotion control and long-horizon strategic decision-making. Robot soccer offers a compelling testbed for this challenge, combining dynamic, competitive, and multi-agent interactions. In this work, we present a hierarchical multi-agent reinforcement learning (MARL) framework that enables fully autonomous and decentralized quadruped robot soccer. First, a set of highly dynamic low-level skills is trained for legged locomotion and ball manipulation, such as walking, dribbling, and kicking. On top of these, a high-level strategic planning policy is trained with Multi-Agent Proximal Policy Optimization (MAPPO) via Fictitious Self-Play (FSP). This learning framework allows agents to adapt to diverse opponent strategies and gives rise to sophisticated team behaviors, including coordinated passing, interception, and dynamic role allocation. With an extensive ablation study, the proposed learning method shows significant advantages in the cooperative and competitive multi-agent soccer game. We deploy the learned policies to real quadruped robots relying solely on onboard proprioception and decentralized localization, with the resulting system supporting autonomous robot-robot and robot-human soccer matches on indoor and outdoor soccer courts.
Leveraging Symmetry in RL-based Legged Locomotion Control
Mar 27, 2024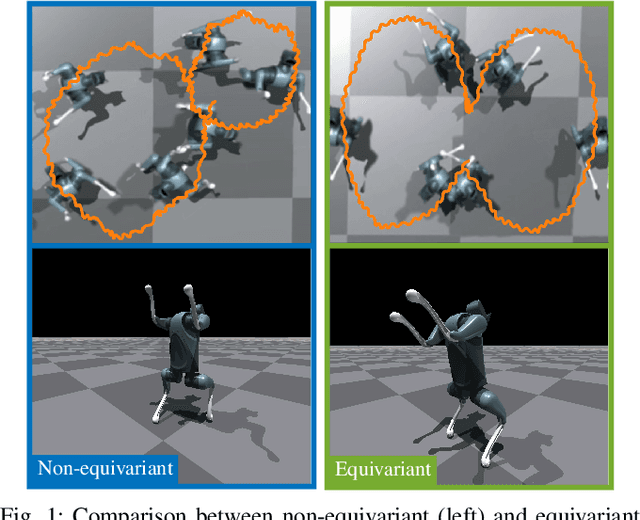
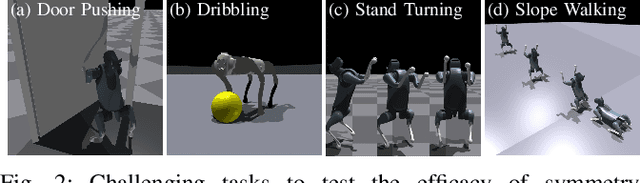

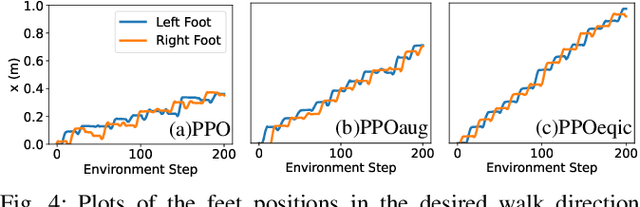
Model-free reinforcement learning is a promising approach for autonomously solving challenging robotics control problems, but faces exploration difficulty without information of the robot's kinematics and dynamics morphology. The under-exploration of multiple modalities with symmetric states leads to behaviors that are often unnatural and sub-optimal. This issue becomes particularly pronounced in the context of robotic systems with morphological symmetries, such as legged robots for which the resulting asymmetric and aperiodic behaviors compromise performance, robustness, and transferability to real hardware. To mitigate this challenge, we can leverage symmetry to guide and improve the exploration in policy learning via equivariance/invariance constraints. In this paper, we investigate the efficacy of two approaches to incorporate symmetry: modifying the network architectures to be strictly equivariant/invariant, and leveraging data augmentation to approximate equivariant/invariant actor-critics. We implement the methods on challenging loco-manipulation and bipedal locomotion tasks and compare with an unconstrained baseline. We find that the strictly equivariant policy consistently outperforms other methods in sample efficiency and task performance in simulation. In addition, symmetry-incorporated approaches exhibit better gait quality, higher robustness and can be deployed zero-shot in real-world experiments.