 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Evaluate Autonomous Behaviour in Human-Robot Interaction
Jul 08, 2025



Evaluating and comparing the performance of autonomous Humanoid Robots is challenging, as success rate metrics are difficult to reproduce and fail to capture the complexity of robot movement trajectories, critical in Human-Robot Interaction and Collaboration (HRIC). To address these challenges, we propose a general evaluation framework that measures the quality of Imitation Learning (IL) methods by focusing on trajectory performance. We devise the Neural Meta Evaluator (NeME), a deep learning model trained to classify actions from robot joint trajectories. NeME serves as a meta-evaluator to compare the performance of robot control policies, enabling policy evaluation without requiring human involvement in the loop. We validate our framework on ergoCub, a humanoid robot, using teleoperation data and comparing IL methods tailored to the available platform. The experimental results indicate that our method is more aligned with the success rate obtained on the robot than baselines, offering a reproducible, systematic, and insightful means for comparing the performance of multimodal imitation learning approaches in complex HRI tasks.
Online DNN-driven Nonlinear MPC for Stylistic Humanoid Robot Walking with Step Adjustment
Oct 10, 2024



This paper presents a three-layered architecture that enables stylistic locomotion with online contact location adjustment. Our method combines an autoregressive Deep Neural Network (DNN) acting as a trajectory generation layer with a model-based trajectory adjustment and trajectory control layers. The DNN produces centroidal and postural references serving as an initial guess and regularizer for the other layers. Being the DNN trained on human motion capture data, the resulting robot motion exhibits locomotion patterns, resembling a human walking style. The trajectory adjustment layer utilizes non-linear optimization to ensure dynamically feasible center of mass (CoM) motion while addressing step adjustments. We compare two implementations of the trajectory adjustment layer: one as a receding horizon planner (RHP) and the other as a model predictive controller (MPC). To enhance MPC performance, we introduce a Kalman filter to reduce measurement noise. The filter parameters are automatically tuned with a Genetic Algorithm. Experimental results on the ergoCub humanoid robot demonstrate the system's ability to prevent falls, replicate human walking styles, and withstand disturbances up to 68 Newton. Website: https://sites.google.com/view/dnn-mpc-walking Youtube video: https://www.youtube.com/watch?v=x3tzEfxO-xQ
Remote telepresence over large distances via robot avatars: case studies
Sep 02, 2024



This paper discusses the necessary considerations and adjustments that allow a recently proposed avatar system architecture to be used with different robotic avatar morphologies (both wheeled and legged robots with various types of hands and kinematic structures) for the purpose of enabling remote (intercontinental) telepresence under communication bandwidth restrictions. The case studies reported involve robots using both position and torque control modes, independently of their software middleware.
Online Non-linear Centroidal MPC with Stability Guarantees for Robust Locomotion of Legged Robots
Sep 02, 2024


Nonlinear model predictive locomotion controllers based on the reduced centroidal dynamics are nowadays ubiquitous in legged robots. These schemes, even if they assume an inherent simplification of the robot's dynamics, were shown to endow robots with a step-adjustment capability in reaction to small pushes, and, moreover, in the case of uncertain parameters - as unknown payloads - they were shown to be able to provide some practical, albeit limited, robustness. In this work, we provide rigorous certificates of their closed loop stability via a reformulation of the centroidal MPC controller. This is achieved thanks to a systematic procedure inspired by the machinery of adaptive control, together with ideas coming from Control Lyapunov functions. Our reformulation, in addition, provides robustness for a class of unmeasured constant disturbances. To demonstrate the generality of our approach, we validated our formulation on a new generation of humanoid robots - the 56.7 kg ergoCub, as well as on a commercially available 21 kg quadruped robot, Aliengo.
XBG: End-to-end Imitation Learning for Autonomous Behaviour in Human-Robot Interaction and Collaboration
Jun 22, 2024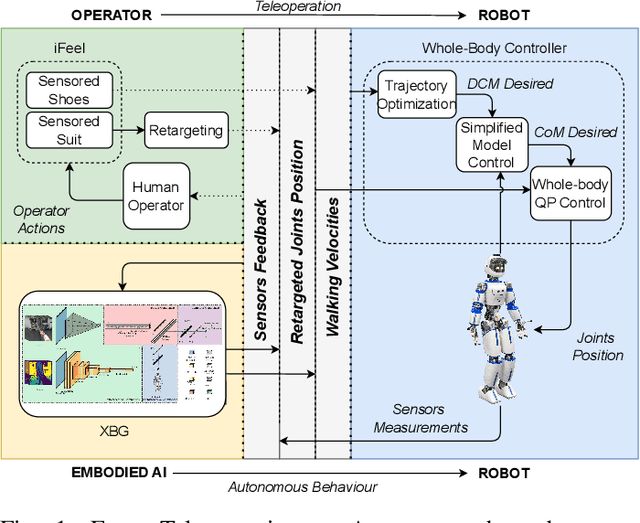
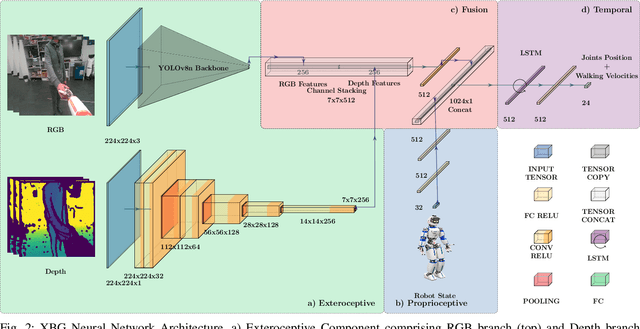
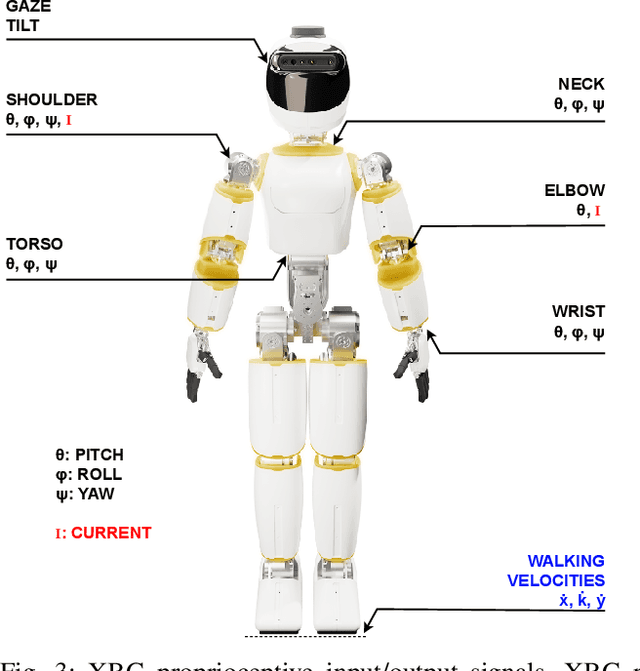
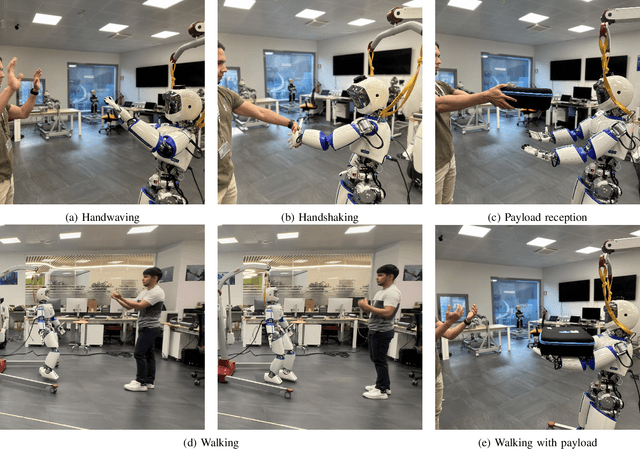
This paper presents XBG (eXteroceptive Behaviour Generation), a multimodal end-to-end Imitation Learning (IL) system for a whole-body autonomous humanoid robot used in real-world Human-Robot Interaction (HRI) scenarios. The main contribution of this paper is an architecture for learning HRI behaviours using a data-driven approach. Through teleoperation, a diverse dataset is collected, comprising demonstrations across multiple HRI scenarios, including handshaking, handwaving, payload reception, walking, and walking with a payload. After synchronizing, filtering, and transforming the data, different Deep Neural Networks (DNN) models are trained. The final system integrates different modalities comprising exteroceptive and proprioceptive sources of information to provide the robot with an understanding of its environment and its own actions. The robot takes sequence of images (RGB and depth) and joints state information during the interactions and then reacts accordingly, demonstrating learned behaviours. By fusing multimodal signals in time, we encode new autonomous capabilities into the robotic platform, allowing the understanding of context changes over time. The models are deployed on ergoCub, a real-world humanoid robot, and their performance is measured by calculating the success rate of the robot's behaviour under the mentioned scenarios.
Analysis and Perspectives on the ANA Avatar XPRIZE Competition
Jan 10, 2024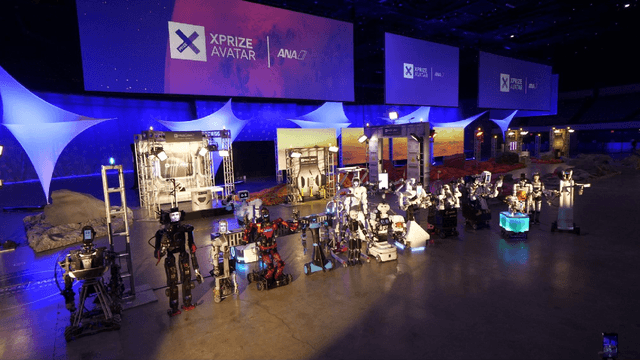
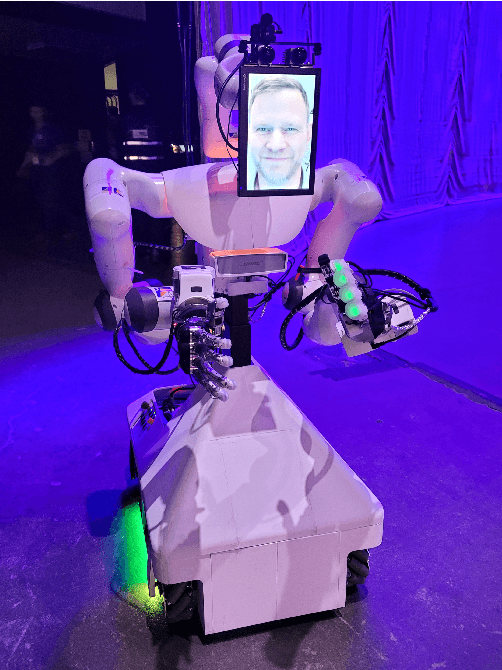
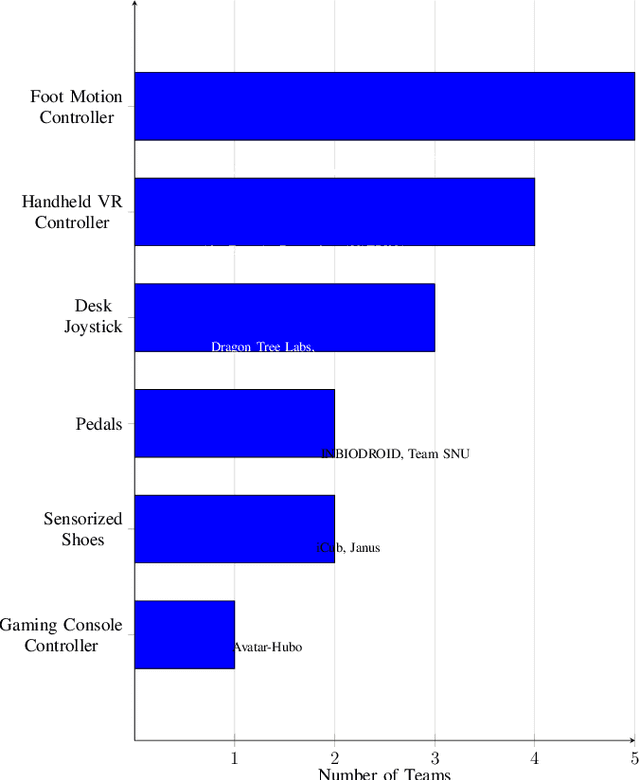
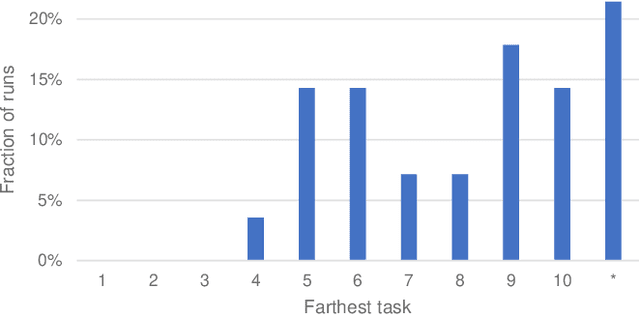
The ANA Avatar XPRIZE was a four-year competition to develop a robotic "avatar" system to allow a human operator to sense, communicate, and act in a remote environment as though physically present. The competition featured a unique requirement that judges would operate the avatars after less than one hour of training on the human-machine interfaces, and avatar systems were judged on both objective and subjective scoring metrics. This paper presents a unified summary and analysis of the competition from technical, judging, and organizational perspectives. We study the use of telerobotics technologies and innovations pursued by the competing teams in their avatar systems, and correlate the use of these technologies with judges' task performance and subjective survey ratings. It also summarizes perspectives from team leads, judges, and organizers about the competition's execution and impact to inform the future development of telerobotics and telepresence.
Codesign of Humanoid Robots for Ergonomy Collaboration with Multiple Humans via Genetic Algorithms and Nonlinear Optimization
Dec 12, 2023



Ergonomics is a key factor to consider when designing control architectures for effective physical collaborations between humans and humanoid robots. In contrast, ergonomic indexes are often overlooked in the robot design phase, which leads to suboptimal performance in physical human-robot interaction tasks. This paper proposes a novel methodology for optimizing the design of humanoid robots with respect to ergonomic indicators associated with the interaction of multiple agents. Our approach leverages a dynamic and kinematic parameterization of the robot link and motor specifications to seek for optimal robot designs using a bilevel optimization approach. Specifically, a genetic algorithm first generates robot designs by selecting the link and motor characteristics. Then, we use nonlinear optimization to evaluate interaction ergonomy indexes during collaborative payload lifting with different humans and weights. To assess the effectiveness of our approach, we compare the optimal design obtained using bilevel optimization against the design obtained using nonlinear optimization. Our results show that the proposed approach significantly improves ergonomics in terms of energy expenditure calculated in two reference scenarios involving static and dynamic robot motions. We plan to apply our methodology to drive the design of the ergoCub2 robot, a humanoid intended for optimal physical collaboration with humans in diverse environments
Whole-Body Trajectory Optimization for Robot Multimodal Locomotion
Nov 23, 2022



The general problem of planning feasible trajectories for multimodal robots is still an open challenge. This paper presents a whole-body trajectory optimisation approach that addresses this challenge by combining methods and tools developed for aerial and legged robots. First, robot models that enable the presented whole-body trajectory optimisation framework are presented. The key model is the so-called robot centroidal momentum, the dynamics of which is directly related to the models of the robot actuation for aerial and terrestrial locomotion. Then, the paper presents how these models can be employed in an optimal control problem to generate either terrestrial or aerial locomotion trajectories with a unified approach. The optimisation problem considers robot kinematics, momentum, thrust forces and their bounds. The overall approach is validated using the multimodal robot iRonCub, a flying humanoid robot that expresses a degree of terrestrial and aerial locomotion. To solve the associated optimal trajectory generation problem, we employ ADAM, a custom-made open-source library that implements a collection of algorithms for calculating rigid-body dynamics using CasADi.
Dynamic Complementarity Conditions and Whole-Body Trajectory Optimization for Humanoid Robot Locomotion
Jul 07, 2022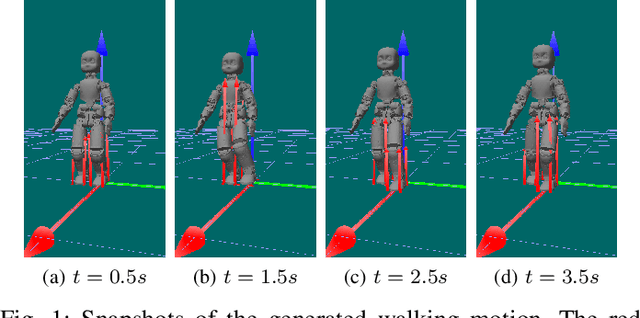
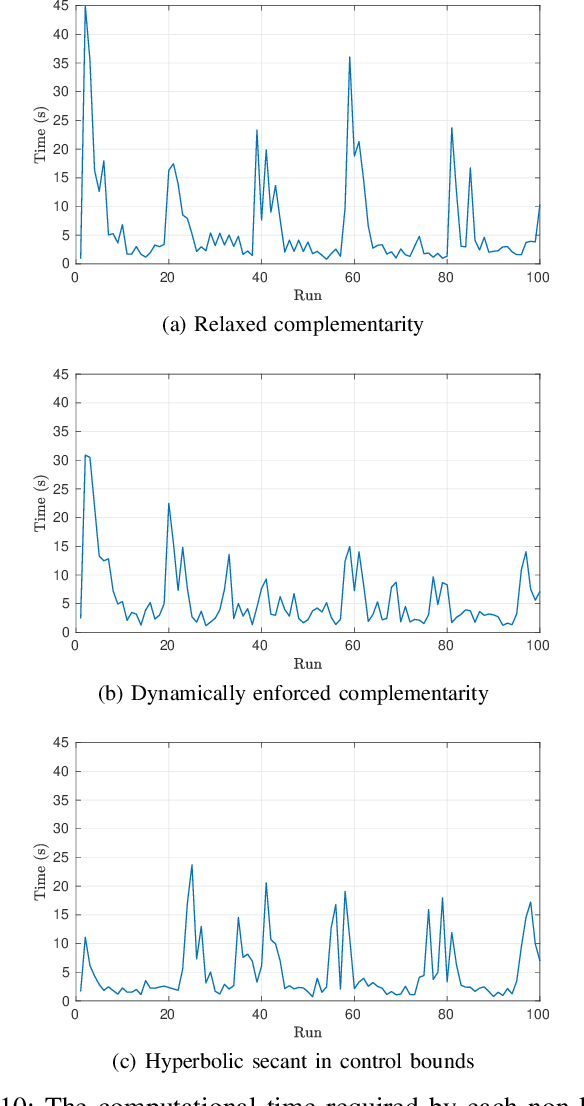
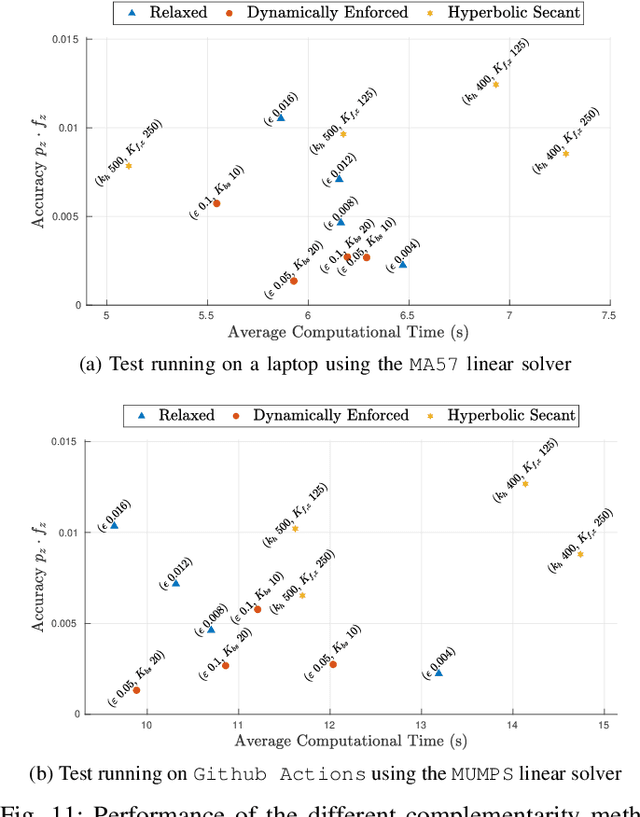
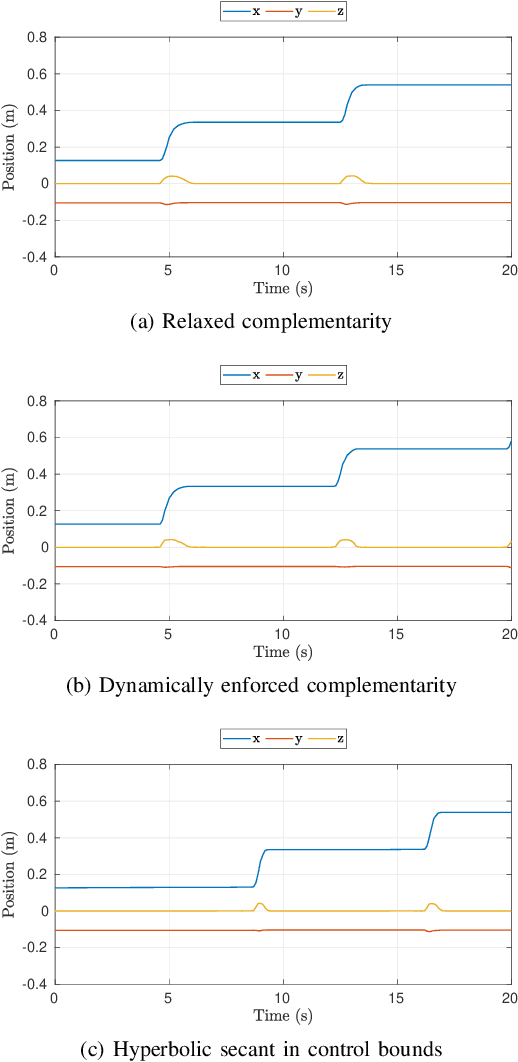
The paper presents a planner to generate walking trajectories by using the centroidal dynamics and the full kinematics of a humanoid robot. The interaction between the robot and the walking surface is modeled explicitly via new conditions, the \emph{Dynamical Complementarity Constraints}. The approach does not require a predefined contact sequence and generates the footsteps automatically. We characterize the robot control objective via a set of tasks, and we address it by solving an optimal control problem. We show that it is possible to achieve walking motions automatically by specifying a minimal set of references, such as a constant desired center of mass velocity and a reference point on the ground. Furthermore, we analyze how the contact modelling choices affect the computational time. We validate the approach by generating and testing walking trajectories for the humanoid robot iCub.
Whole-Body Human Kinematics Estimation using Dynamical Inverse Kinematics and Contact-Aided Lie Group Kalman Filter
May 16, 2022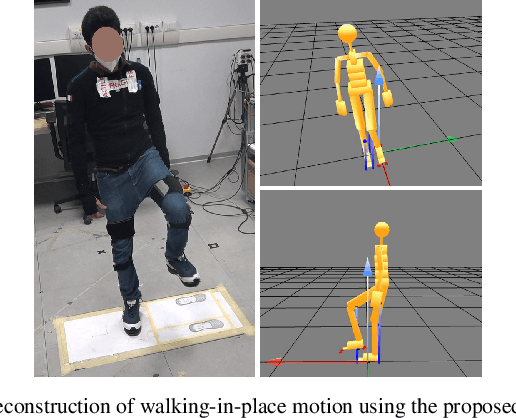
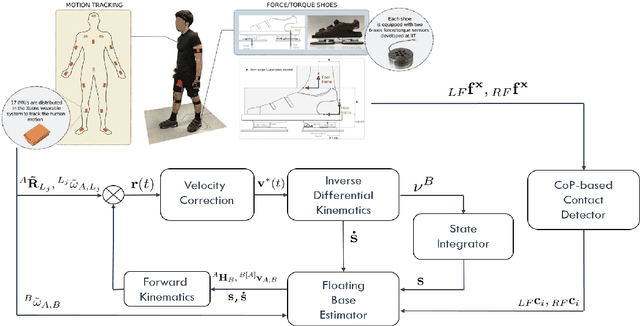
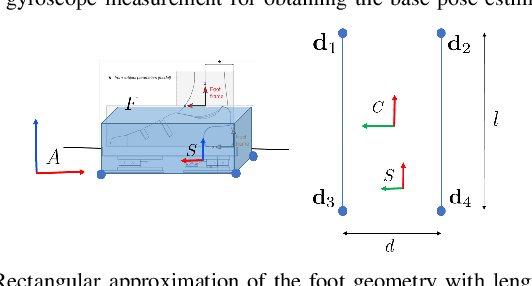
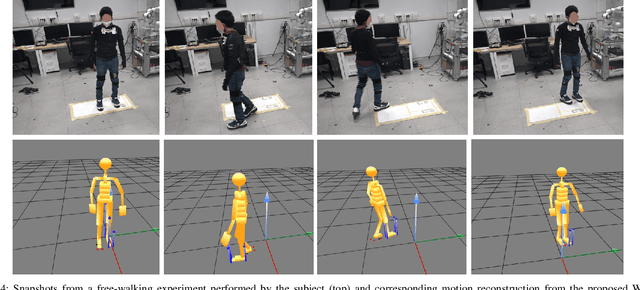
Full-body motion estimation of a human through wearable sensing technologies is challenging in the absence of position sensors. This paper contributes to the development of a model-based whole-body kinematics estimation algorithm using wearable distributed inertial and force-torque sensing. This is done by extending the existing dynamical optimization-based Inverse Kinematics (IK) approach for joint state estimation, in cascade, to include a center of pressure-based contact detector and a contact-aided Kalman filter on Lie groups for floating base pose estimation. The proposed method is tested in an experimental scenario where a human equipped with a sensorized suit and shoes performs walking motions. The proposed method is demonstrated to obtain a reliable reconstruction of the whole-body human motion.