 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Complementarity Conditions and Whole-Body Trajectory Optimization for Humanoid Robot Locomotion
Paper and Code
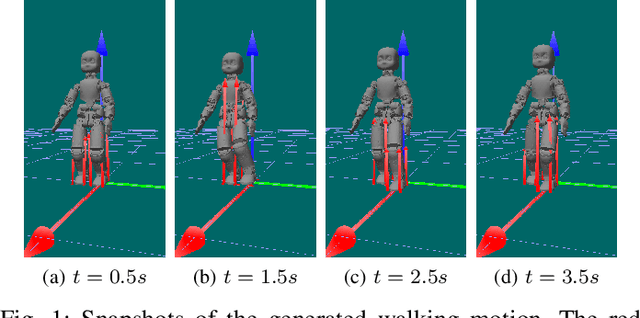
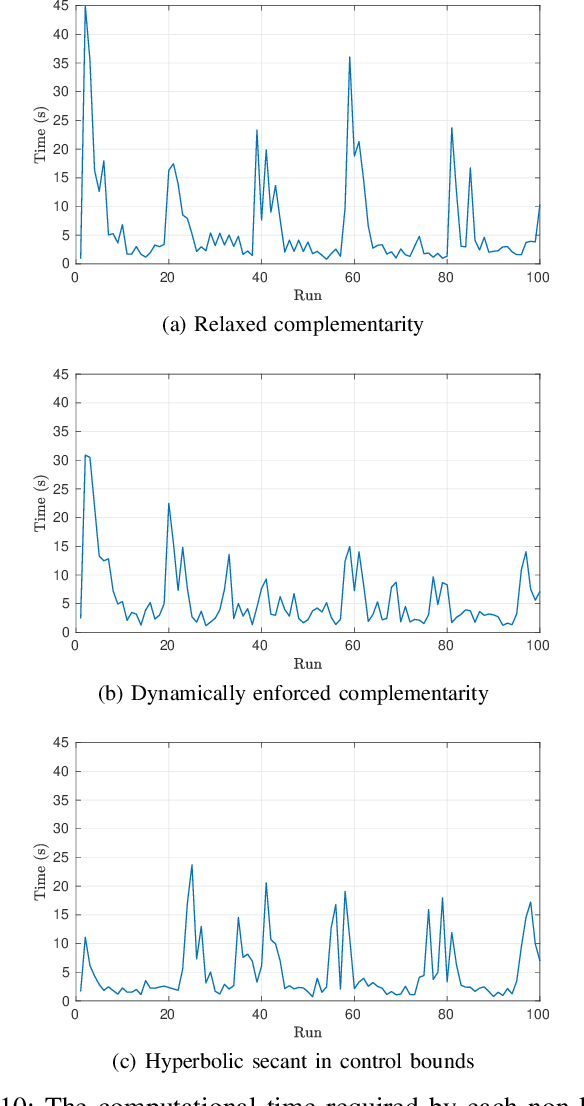
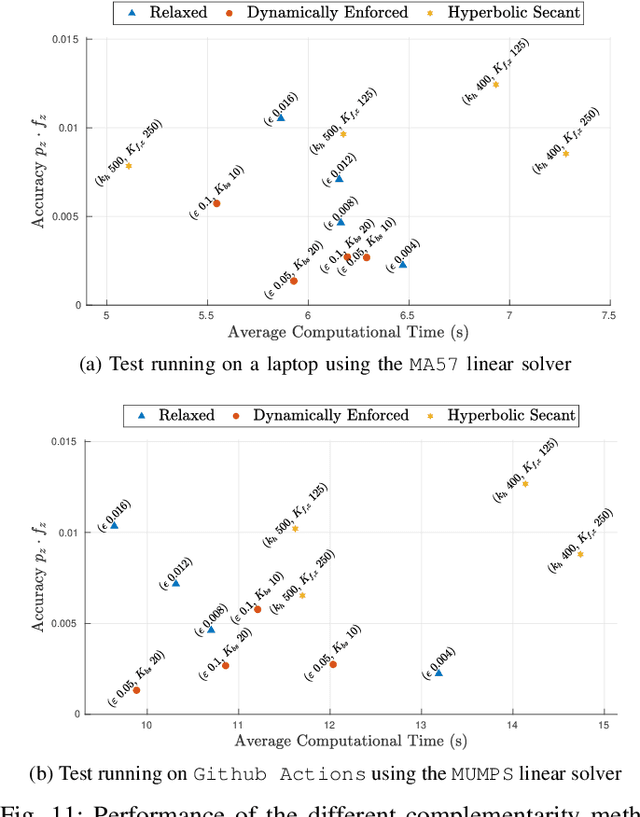
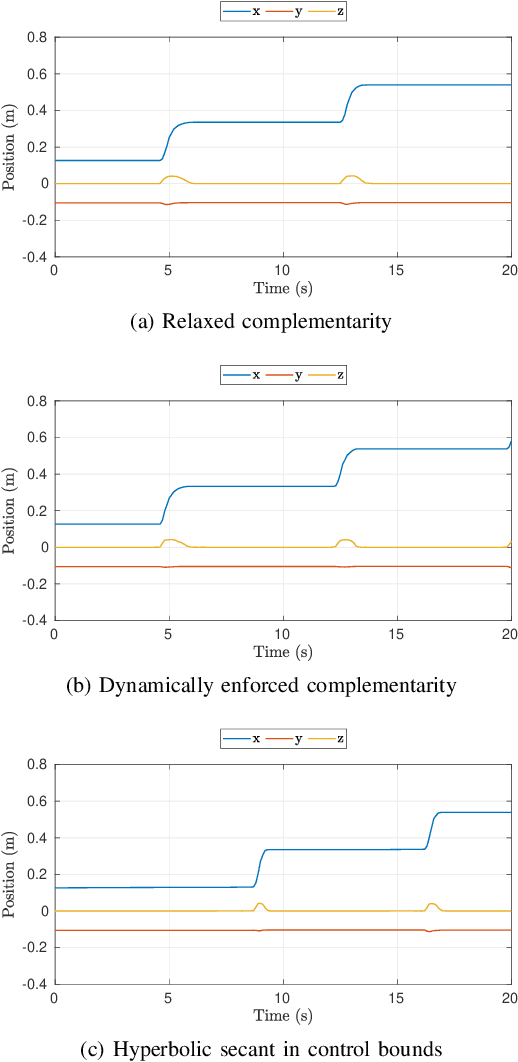
The paper presents a planner to generate walking trajectories by using the centroidal dynamics and the full kinematics of a humanoid robot. The interaction between the robot and the walking surface is modeled explicitly via new conditions, the \emph{Dynamical Complementarity Constraints}. The approach does not require a predefined contact sequence and generates the footsteps automatically. We characterize the robot control objective via a set of tasks, and we address it by solving an optimal control problem. We show that it is possible to achieve walking motions automatically by specifying a minimal set of references, such as a constant desired center of mass velocity and a reference point on the ground. Furthermore, we analyze how the contact modelling choices affect the computational time. We validate the approach by generating and testing walking trajectories for the humanoid robot iCub.