 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSoft Finger Grasp Force and Contact State Estimation from Tactile Sensors
Oct 25, 2024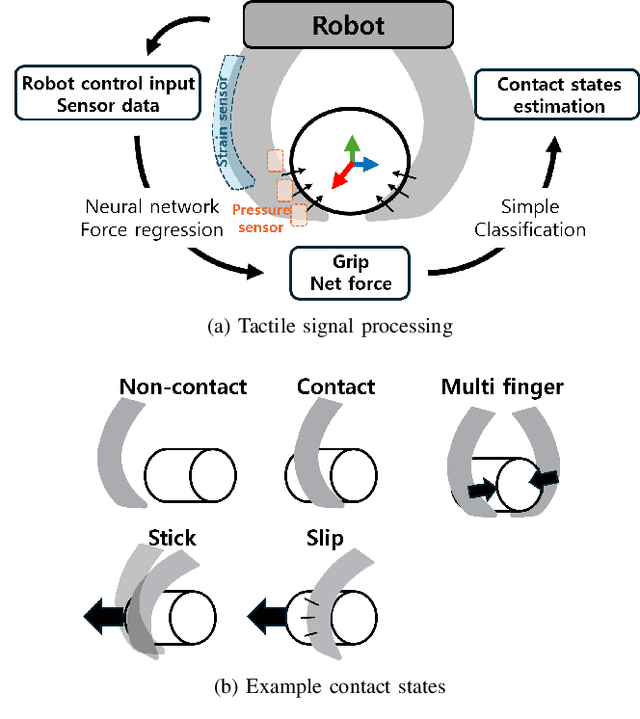

Soft robotic fingers can improve adaptability in grasping and manipulation, compensating for geometric variation in object or environmental contact, but today lack force capacity and fine dexterity. Integrated tactile sensors can provide grasp and task information which can improve dexterity,but should ideally not require object-specific training. The total force vector exerted by a finger provides general information to the internal grasp forces (e.g. for grasp stability) and, when summed over fingers, an estimate of the external force acting on the grasped object (e.g. for task-level control). In this study, we investigate the efficacy of estimating finger force from integrated soft sensors and use it to estimate contact states. We use a neural network for force regression, collecting labelled data with a force/torque sensor and a range of test objects. Subsequently, we apply this model in a plug-in task scenario and demonstrate its validity in estimating contact states.
Analysis and Perspectives on the ANA Avatar XPRIZE Competition
Jan 10, 2024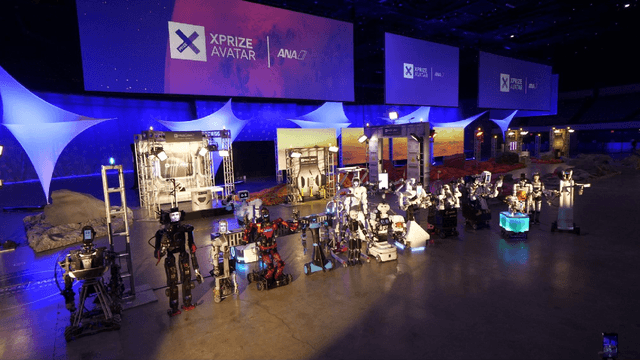
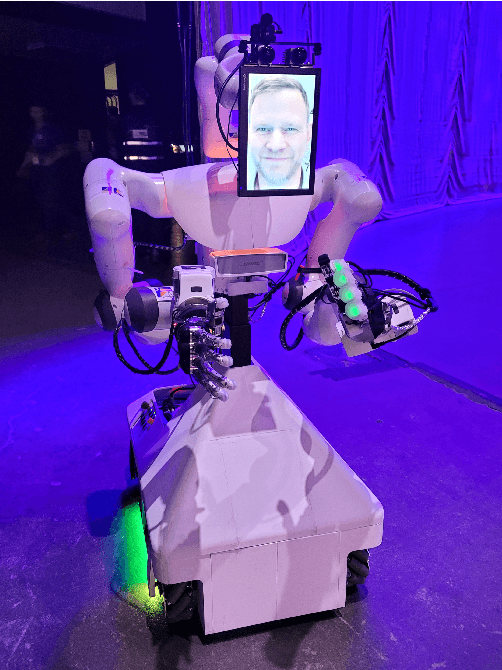
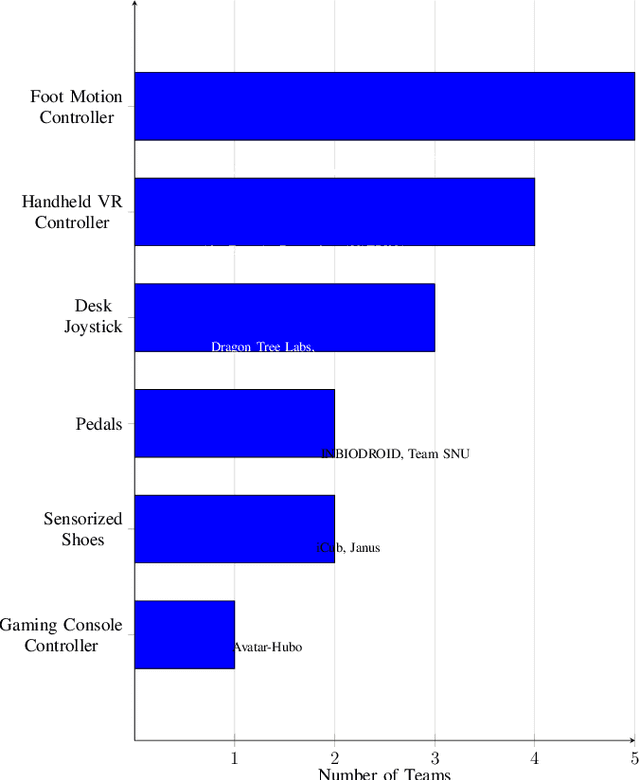
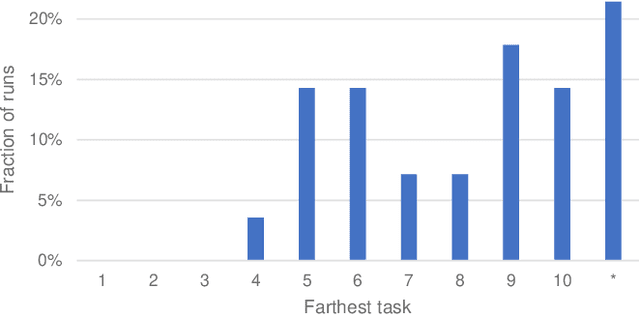
The ANA Avatar XPRIZE was a four-year competition to develop a robotic "avatar" system to allow a human operator to sense, communicate, and act in a remote environment as though physically present. The competition featured a unique requirement that judges would operate the avatars after less than one hour of training on the human-machine interfaces, and avatar systems were judged on both objective and subjective scoring metrics. This paper presents a unified summary and analysis of the competition from technical, judging, and organizational perspectives. We study the use of telerobotics technologies and innovations pursued by the competing teams in their avatar systems, and correlate the use of these technologies with judges' task performance and subjective survey ratings. It also summarizes perspectives from team leads, judges, and organizers about the competition's execution and impact to inform the future development of telerobotics and telepresence.
Soft finger dynamic stability and slip by Coulomb friction and bulk stiffness
Oct 07, 2023



Soft robotic fingers can safely grasp fragile or non-uniform objects, but their force capacity is limited, especially with less contact area: objects which are smaller, not round, or where an enclosing grasp is not feasible. To improve force capacity, this paper considers two types of grip failure, slip and dynamic rotational stability. For slip, a Coulomb model for soft fingers based on total normal and tangential force is validated, identifying the effect of contact area, pressure, and grip position on effective Coulomb coefficient, normal force and transverse stiffness. For rotational stability, bulk stiffness of the fingers is used to develop conditions for dynamic stability about the initial grasp, and a condition for when the rotation leads to slip. Together, these models suggest contact area improves grip by increasing transverse stiffness and normal force. The models are validated in a range of grasp conditions, shown to predict the influence of object radius and finger distance on grip stability limits.
Impact Intensity Estimation of a Quadruped Robot without Using a Force Sensor
Apr 03, 2022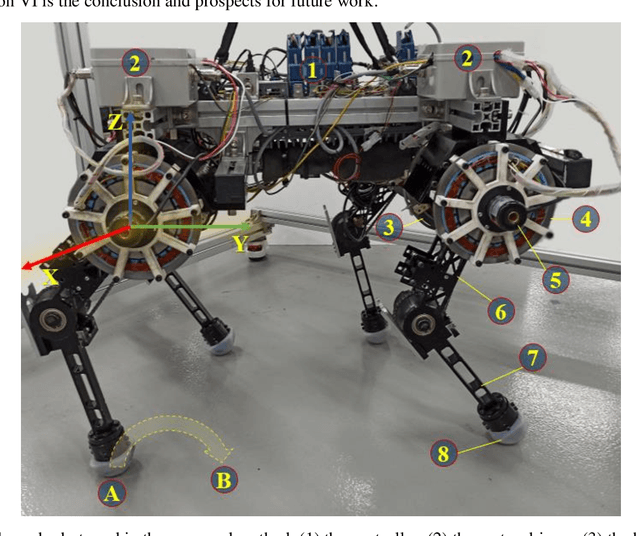
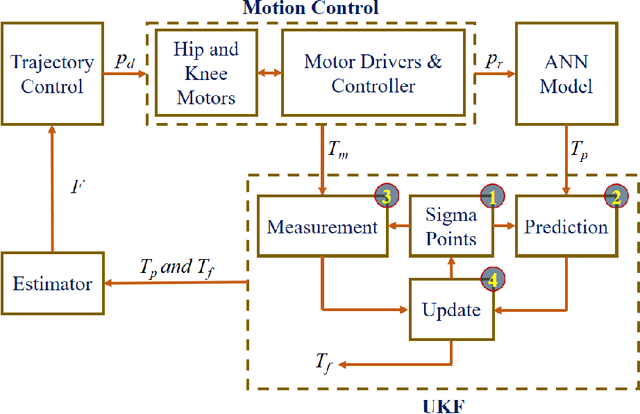
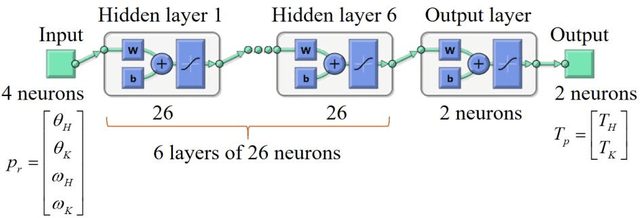
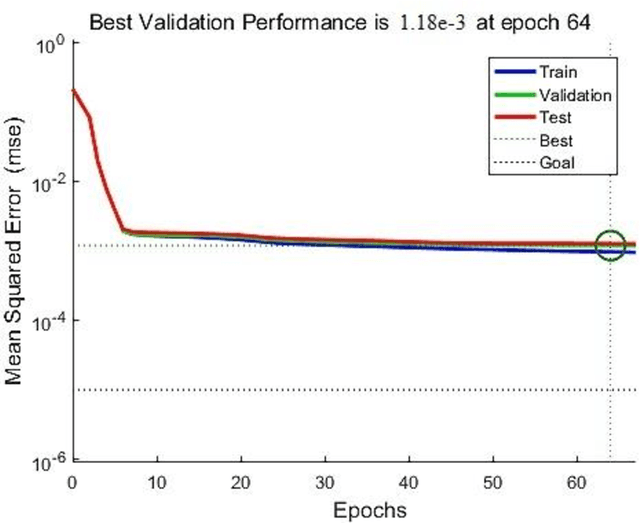
Estimating the impact intensity is one of the significant tasks of the legged robot. Accurate feedback of the impact may support the robot to plan a suitable and efficient trajectory to adapt to unknown complex terrains. Ordinarily, this task is performed by a force sensor in the robot's foot. In this letter, an impact intensity estimation without using a force sensor is proposed. An artificial neural network model is designed to predict the motor torques of the legs in an instantaneous position in the trajectory without utilizing the complex kinematic and dynamic models of motion. An unscented Kalman filter is used during the trajectory to smooth and stabilize the measurement. Based on the difference between the predicted information and the filtered value, the state and intensity of the robot foot's impact with the obstacles are estimated. The simulation and experiment on a quadruped robot are carried out to verify the effectiveness of the proposed method.