 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSoft Finger Grasp Force and Contact State Estimation from Tactile Sensors
Oct 25, 2024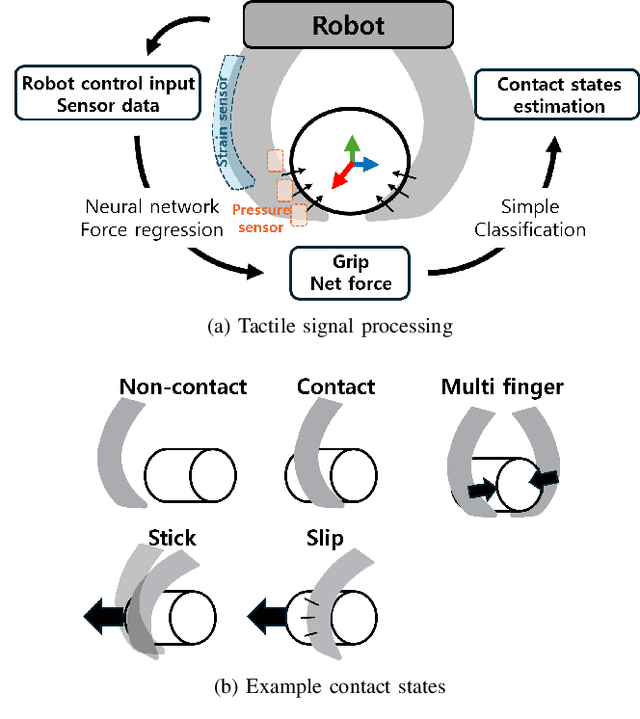

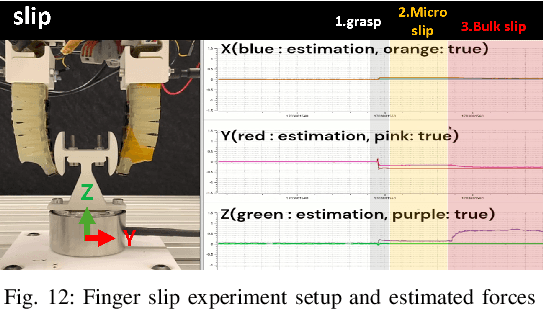
Soft robotic fingers can improve adaptability in grasping and manipulation, compensating for geometric variation in object or environmental contact, but today lack force capacity and fine dexterity. Integrated tactile sensors can provide grasp and task information which can improve dexterity,but should ideally not require object-specific training. The total force vector exerted by a finger provides general information to the internal grasp forces (e.g. for grasp stability) and, when summed over fingers, an estimate of the external force acting on the grasped object (e.g. for task-level control). In this study, we investigate the efficacy of estimating finger force from integrated soft sensors and use it to estimate contact states. We use a neural network for force regression, collecting labelled data with a force/torque sensor and a range of test objects. Subsequently, we apply this model in a plug-in task scenario and demonstrate its validity in estimating contact states.
Soft finger dynamic stability and slip by Coulomb friction and bulk stiffness
Oct 07, 2023



Soft robotic fingers can safely grasp fragile or non-uniform objects, but their force capacity is limited, especially with less contact area: objects which are smaller, not round, or where an enclosing grasp is not feasible. To improve force capacity, this paper considers two types of grip failure, slip and dynamic rotational stability. For slip, a Coulomb model for soft fingers based on total normal and tangential force is validated, identifying the effect of contact area, pressure, and grip position on effective Coulomb coefficient, normal force and transverse stiffness. For rotational stability, bulk stiffness of the fingers is used to develop conditions for dynamic stability about the initial grasp, and a condition for when the rotation leads to slip. Together, these models suggest contact area improves grip by increasing transverse stiffness and normal force. The models are validated in a range of grasp conditions, shown to predict the influence of object radius and finger distance on grip stability limits.