 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRemote telepresence over large distances via robot avatars: case studies
Sep 02, 2024



This paper discusses the necessary considerations and adjustments that allow a recently proposed avatar system architecture to be used with different robotic avatar morphologies (both wheeled and legged robots with various types of hands and kinematic structures) for the purpose of enabling remote (intercontinental) telepresence under communication bandwidth restrictions. The case studies reported involve robots using both position and torque control modes, independently of their software middleware.
Online Non-linear Centroidal MPC with Stability Guarantees for Robust Locomotion of Legged Robots
Sep 02, 2024


Nonlinear model predictive locomotion controllers based on the reduced centroidal dynamics are nowadays ubiquitous in legged robots. These schemes, even if they assume an inherent simplification of the robot's dynamics, were shown to endow robots with a step-adjustment capability in reaction to small pushes, and, moreover, in the case of uncertain parameters - as unknown payloads - they were shown to be able to provide some practical, albeit limited, robustness. In this work, we provide rigorous certificates of their closed loop stability via a reformulation of the centroidal MPC controller. This is achieved thanks to a systematic procedure inspired by the machinery of adaptive control, together with ideas coming from Control Lyapunov functions. Our reformulation, in addition, provides robustness for a class of unmeasured constant disturbances. To demonstrate the generality of our approach, we validated our formulation on a new generation of humanoid robots - the 56.7 kg ergoCub, as well as on a commercially available 21 kg quadruped robot, Aliengo.
Touch, press and stroke: a soft capacitive sensor skin
Jul 06, 2023Soft sensors that can discriminate shear and normal force could help provide machines the fine control desirable for safe and effective physical interactions with people. A capacitive sensor is made for this purpose, composed of patterned elastomer and containing both fixed and sliding pillars that allow the sensor to deform and buckle, much like skin itself. The sensor differentiates between simultaneously applied pressure and shear. In addition, finger proximity is detectable up to 15 mm, with a pressure and shear sensitivity of 1 kPa and a displacement resolution of 50 $\mu$m. The operation is demonstrated on a simple gripper holding a cup. The combination of features and the straightforward fabrication method make this sensor a candidate for implementation as a sensing skin for humanoid robotics applications.
A Control Approach for Human-Robot Ergonomic Payload Lifting
May 15, 2023



Collaborative robots can relief human operators from excessive efforts during payload lifting activities. Modelling the human partner allows the design of safe and efficient collaborative strategies. In this paper, we present a control approach for human-robot collaboration based on human monitoring through whole-body wearable sensors, and interaction modelling through coupled rigid-body dynamics. Moreover, a trajectory advancement strategy is proposed, allowing for online adaptation of the robot trajectory depending on the human motion. The resulting framework allows us to perform payload lifting tasks, taking into account the ergonomic requirements of the agents. Validation has been performed in an experimental scenario using the iCub3 humanoid robot and a human subject sensorized with the iFeel wearable system.
Control of Humanoid in Multiple Fixed and Moving Unilateral Contacts
Oct 21, 2021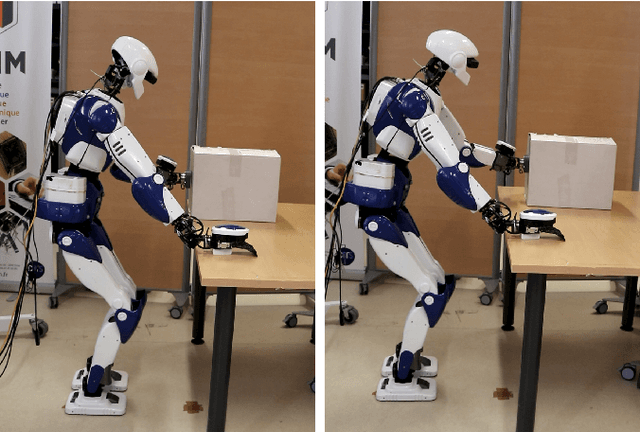
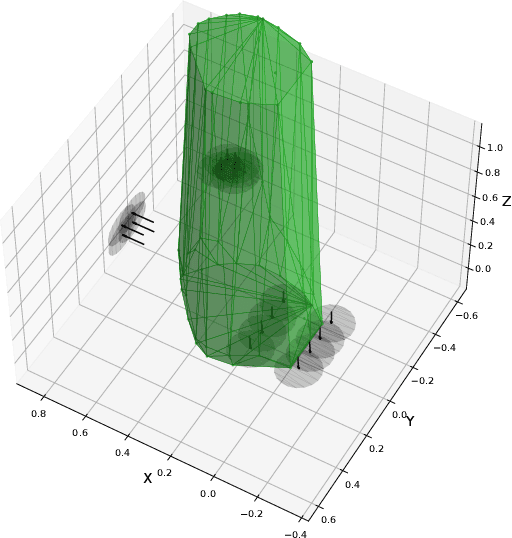
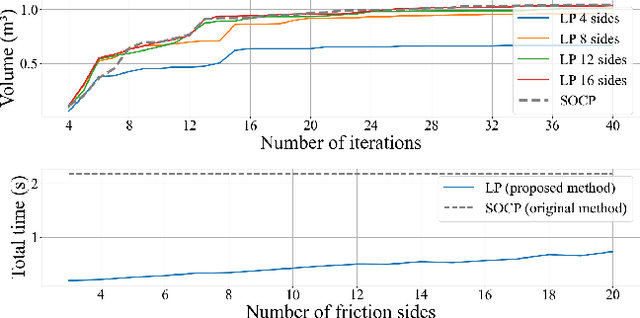
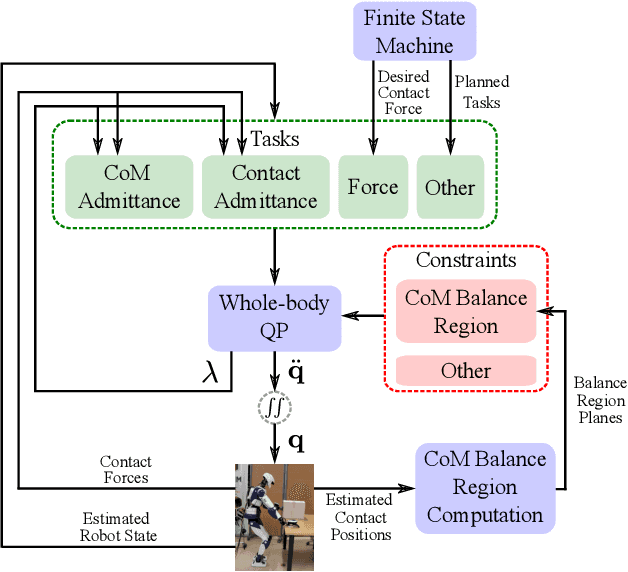
Enforcing balance of multi-limbed robots in multiple non-coplanar unilateral contact settings is challenging when a subset of such contacts are also induced in motion tasks. The first contribution of this paper is in enhancing the computational performance of state-of-the-art geometric center-of-mass inclusion-based balance method to be integrated online as part of a task-space whole-body control framework. As a consequence, our second contribution lies in integrating such a balance region with relevant contact force distribution without pre-computing a target center-of-mass. This last feature is essential to leave the latter with freedom to better comply with other existing tasks that are not captured in classical twolevel approaches. We assess the performance of our proposed method through experiments using the HRP-4 humanoid robot.
Shared Control of Robot-Robot Collaborative Lifting with Agent Postural and Force Ergonomic Optimization
Apr 28, 2021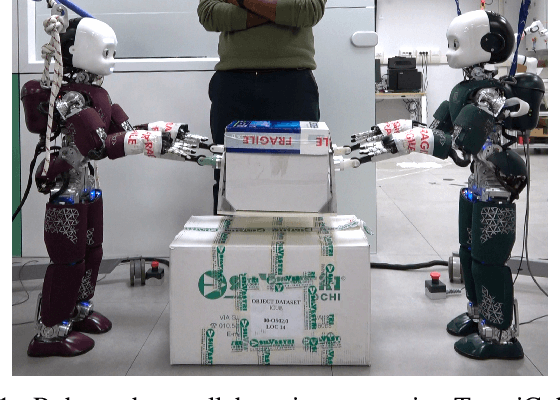
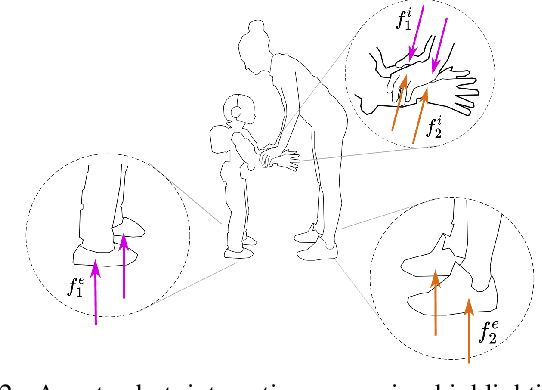
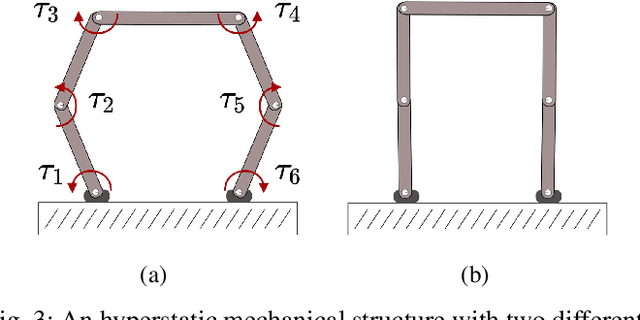
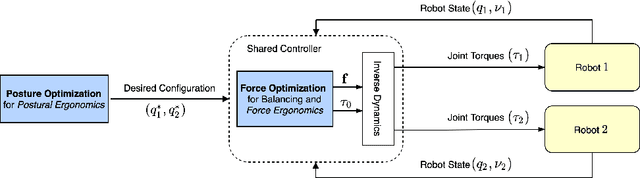
Humans show specialized strategies for efficient collaboration. Transferring similar strategies to humanoid robots can improve their capability to interact with other agents, leading the way to complex collaborative scenarios with multiple agents acting on a shared environment. In this paper we present a control framework for robot-robot collaborative lifting. The proposed shared controller takes into account the joint action of both the robots thanks to a centralized controller that communicates with them, and solves the whole-system optimization. Efficient collaboration is ensured by taking into account the ergonomic requirements of the robots through the optimization of posture and contact forces. The framework is validated in an experimental scenario with two iCub humanoid robots performing different payload lifting sequences.