 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeControl of Humanoid in Multiple Fixed and Moving Unilateral Contacts
Oct 21, 2021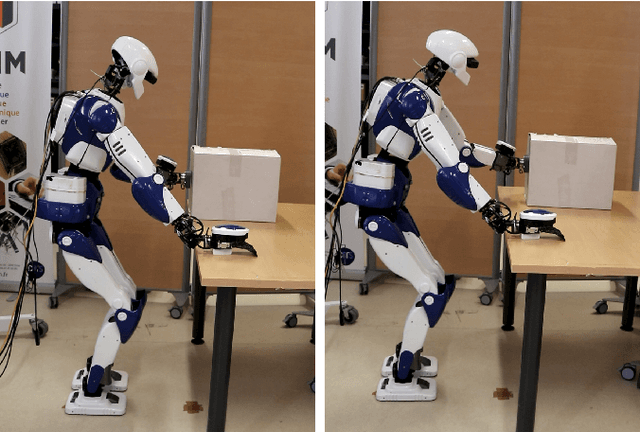
Enforcing balance of multi-limbed robots in multiple non-coplanar unilateral contact settings is challenging when a subset of such contacts are also induced in motion tasks. The first contribution of this paper is in enhancing the computational performance of state-of-the-art geometric center-of-mass inclusion-based balance method to be integrated online as part of a task-space whole-body control framework. As a consequence, our second contribution lies in integrating such a balance region with relevant contact force distribution without pre-computing a target center-of-mass. This last feature is essential to leave the latter with freedom to better comply with other existing tasks that are not captured in classical twolevel approaches. We assess the performance of our proposed method through experiments using the HRP-4 humanoid robot.