 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHumanoid Loco-Manipulations Pattern Generation and Stabilization Control
May 30, 2025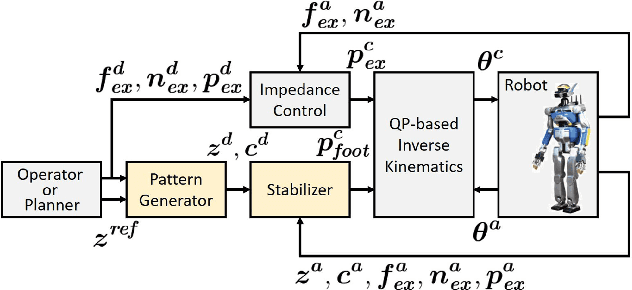



In order for a humanoid robot to perform loco-manipulation such as moving an object while walking, it is necessary to account for sustained or alternating external forces other than ground-feet reaction, resulting from humanoid-object contact interactions. In this letter, we propose a bipedal control strategy for humanoid loco-manipulation that can cope with such external forces. First, the basic formulas of the bipedal dynamics, i.e., linear inverted pendulum mode and divergent component of motion, are derived, taking into account the effects of external manipulation forces. Then, we propose a pattern generator to plan center of mass trajectories consistent with the reference trajectory of the manipulation forces, and a stabilizer to compensate for the error between desired and actual manipulation forces. The effectiveness of our controller is assessed both in simulation and loco-manipulation experiments with real humanoid robots.
Humanoid Loco-manipulation Planning based on Graph Search and Reachability Maps
May 29, 2025In this letter, we propose an efficient and highly versatile loco-manipulation planning for humanoid robots. Loco-manipulation planning is a key technological brick enabling humanoid robots to autonomously perform object transportation by manipulating them. We formulate planning of the alternation and sequencing of footsteps and grasps as a graph search problem with a new transition model that allows for a flexible representation of loco-manipulation. Our transition model is quickly evaluated by relocating and switching the reachability maps depending on the motion of both the robot and object. We evaluate our approach by applying it to loco-manipulation use-cases, such as a bobbin rolling operation with regrasping, where the motion is automatically planned by our framework.
Humanoid Locomotion and Manipulation: Current Progress and Challenges in Control, Planning, and Learning
Jan 03, 2025



Humanoid robots have great potential to perform various human-level skills. These skills involve locomotion, manipulation, and cognitive capabilities. Driven by advances in machine learning and the strength of existing model-based approaches, these capabilities have progressed rapidly, but often separately. Therefore, a timely overview of current progress and future trends in this fast-evolving field is essential. This survey first summarizes the model-based planning and control that have been the backbone of humanoid robotics for the past three decades. We then explore emerging learning-based methods, with a focus on reinforcement learning and imitation learning that enhance the versatility of loco-manipulation skills. We examine the potential of integrating foundation models with humanoid embodiments, assessing the prospects for developing generalist humanoid agents. In addition, this survey covers emerging research for whole-body tactile sensing that unlocks new humanoid skills that involve physical interactions. The survey concludes with a discussion of the challenges and future trends.
Humanoid Robot RHP Friends: Seamless Combination of Autonomous and Teleoperated Tasks in a Nursing Context
Dec 30, 2024



This paper describes RHP Friends, a social humanoid robot developed to enable assistive robotic deployments in human-coexisting environments. As a use-case application, we present its potential use in nursing by extending its capabilities to operate human devices and tools according to the task and by enabling remote assistance operations. To meet a wide variety of tasks and situations in environments designed by and for humans, we developed a system that seamlessly integrates the slim and lightweight robot and several technologies: locomanipulation, multi-contact motion, teleoperation, and object detection and tracking. We demonstrated the system's usage in a nursing application. The robot efficiently performed the daily task of patient transfer and a non-routine task, represented by a request to operate a circuit breaker. This demonstration, held at the 2023 International Robot Exhibition (IREX), conducted three times a day over three days.
Efficient Lexicographic Optimization for Prioritized Robot Control and Planning
Mar 14, 2024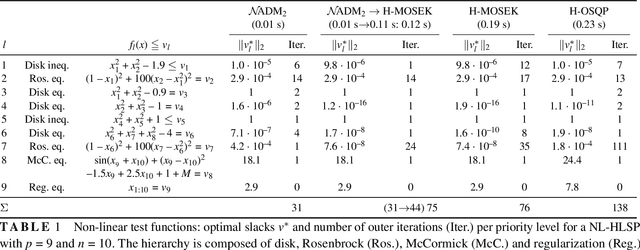
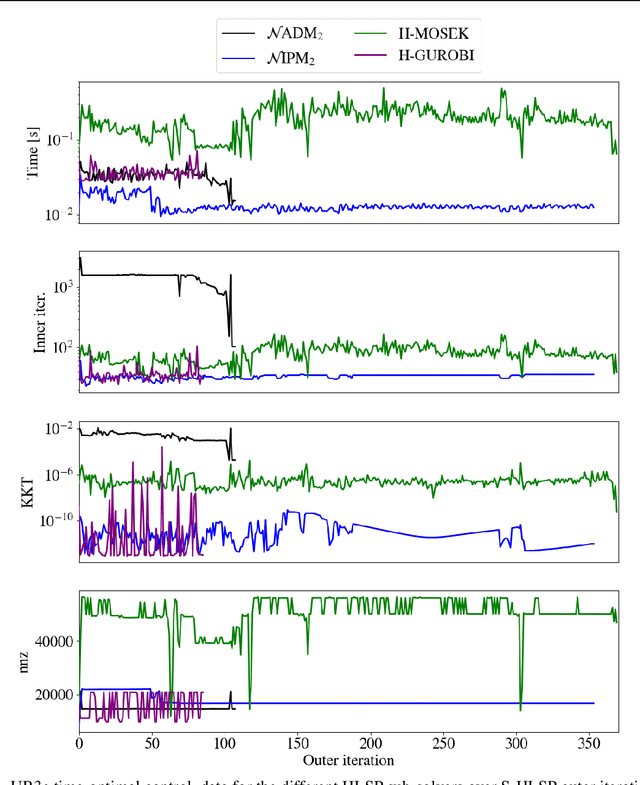
In this work, we present several tools for efficient sequential hierarchical least-squares programming (S-HLSP) for lexicographical optimization tailored to robot control and planning. As its main step, S-HLSP relies on approximations of the original non-linear hierarchical least-squares programming (NL-HLSP) to a hierarchical least-squares programming (HLSP) by the hierarchical Newton's method or the hierarchical Gauss-Newton algorithm. We present a threshold adaptation strategy for appropriate switches between the two. This ensures optimality of infeasible constraints, promotes numerical stability when solving the HLSP's and enhances optimality of lower priority levels by avoiding regularized local minima. We introduce the solver $\mathcal{N}$ADM$_2$, an alternating direction method of multipliers for HLSP based on nullspace projections of active constraints. The required basis of nullspace of the active constraints is provided by a computationally efficient turnback algorithm for system dynamics discretized by the Euler method. It is based on an upper bound on the bandwidth of linearly independent column subsets within the linearized constraint matrices. Importantly, an expensive initial rank-revealing matrix factorization is unnecessary. We show how the high sparsity of the basis in the fully-actuated case can be preserved in the under-actuated case. $\mathcal{N}$ADM$_2$ consistently shows faster computations times than competing off-the-shelf solvers on NL-HLSP composed of test-functions and whole-body trajectory optimization for fully-actuated and under-actuated robotic systems. We demonstrate how the inherently lower accuracy solutions of the alternating direction method of multipliers can be used to warm-start the non-linear solver for efficient computation of high accuracy solutions to non-linear hierarchical least-squares programs.
Analysis and Perspectives on the ANA Avatar XPRIZE Competition
Jan 10, 2024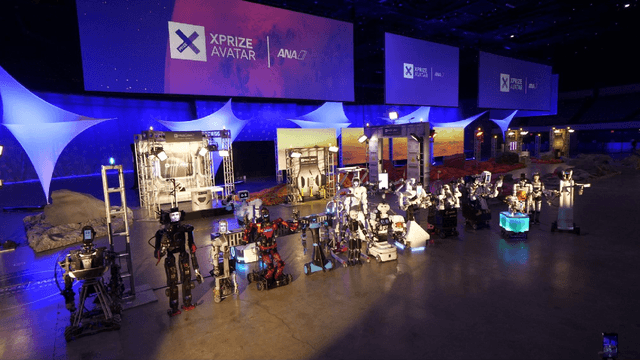
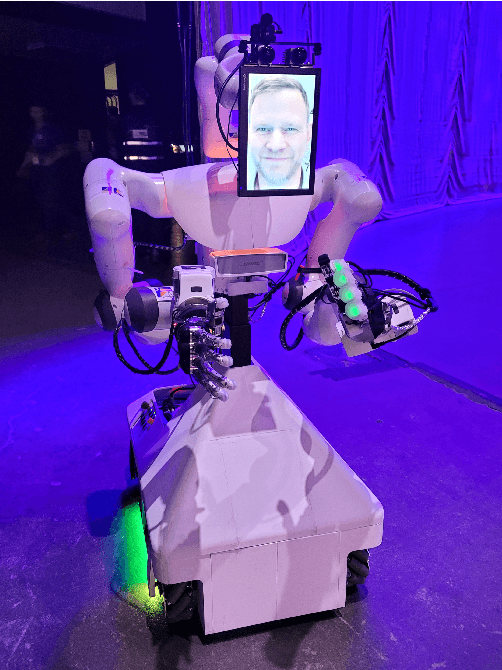
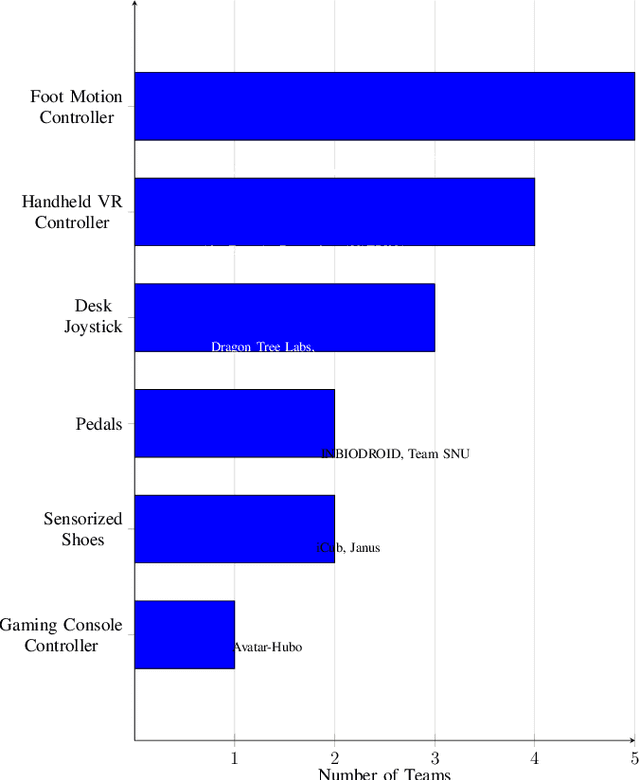
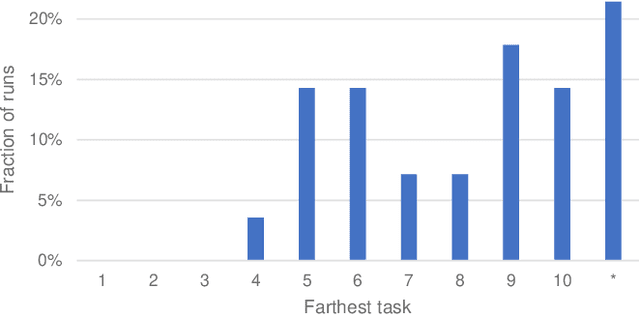
The ANA Avatar XPRIZE was a four-year competition to develop a robotic "avatar" system to allow a human operator to sense, communicate, and act in a remote environment as though physically present. The competition featured a unique requirement that judges would operate the avatars after less than one hour of training on the human-machine interfaces, and avatar systems were judged on both objective and subjective scoring metrics. This paper presents a unified summary and analysis of the competition from technical, judging, and organizational perspectives. We study the use of telerobotics technologies and innovations pursued by the competing teams in their avatar systems, and correlate the use of these technologies with judges' task performance and subjective survey ratings. It also summarizes perspectives from team leads, judges, and organizers about the competition's execution and impact to inform the future development of telerobotics and telepresence.
Impact-Aware Multi-Contact Balance Criteria
Aug 13, 2023



Intentionally applying impacts while maintaining balance is challenging for legged robots. This study originated from observing experimental data of the humanoid robot HRP-4 intentionally hitting a wall with its right arm while standing on two feet. Strangely, violating the usual zero moment point balance criteria did not systematically result in a fall. To investigate this phenomenon, we propose the zero-step capture region for non-coplanar contacts, defined as the center of mass (CoM) velocity area, and validated it with push-recovery experiments employing the HRP-4 balancing on two non-coplanar contacts. To further enable on-purpose impacts, we compute the set of candidate post-impact CoM velocities accounting for frictional-impact dynamics in three dimensions, and restrict the entire set within the CoM velocity area to maintain balance with the sustained contacts during and after impacts. We illustrate the maximum contact velocity for various HRP-4 stances in simulation, indicating potential for integration into other task-space whole-body controllers or planners. This study is the first to address the challenging problem of applying an intentional impact with a kinematic-controlled humanoid robot on non-coplanar contacts.
Robust Task-Space Quadratic Programming for Kinematic-Controlled Robots
Jul 27, 2023



Task-space quadratic programming (QP) is an elegant approach for controlling robots subject to constraints. Yet, in the case of kinematic-controlled (i.e., high-gains position or velocity) robots, closed-loop QP control scheme can be prone to instability depending on how the gains related to the tasks or the constraints are chosen. In this paper, we address such instability shortcomings. First, we highlight the non-robustness of the closed-loop system against non-modeled dynamics, such as those relative to joint-dynamics, flexibilities, external perturbations, etc. Then, we propose a robust QP control formulation based on high-level integral feedback terms in the task-space including the constraints. The proposed method is formally proved to ensure closed-loop robust stability and is intended to be applied to any kinematic-controlled robots under practical assumptions. We assess our approach through experiments on a fixed-base robot performing stable fast motions, and a floating-base humanoid robot robustly reacting to perturbations to keep its balance.
The hierarchical Newton's method for numerically stable prioritized dynamic control
Mar 08, 2023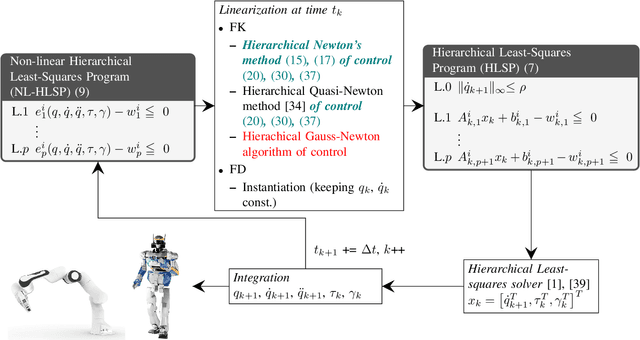
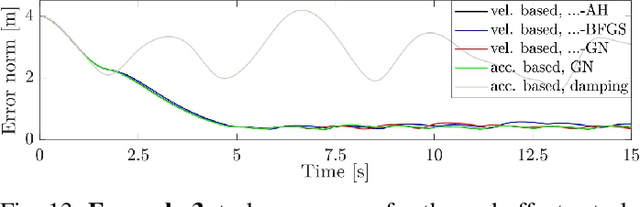
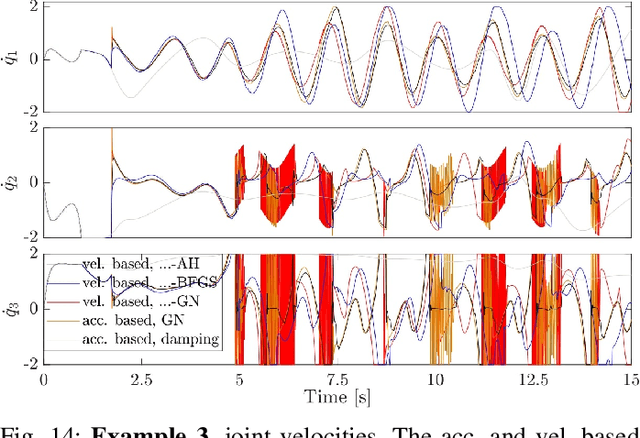
This work links optimization approaches from hierarchical least-squares programming to instantaneous prioritized whole-body robot control. Concretely, we formulate the hierarchical Newton's method which solves prioritized non-linear least-squares problems in a numerically stable fashion even in the presence of kinematic and algorithmic singularities of the approximated kinematic constraints. These results are then transferred to control problems which exhibit the additional variability of time. This is necessary in order to formulate acceleration based controllers and to incorporate the second order dynamics. However, we show that the Newton's method without complicated adaptations is not appropriate in the acceleration domain. We therefore formulate a velocity based controller which exhibits second order proportional derivative convergence characteristics. Our developments are verified in toy robot control scenarios as well as in complex robot experiments which stress the importance of prioritized control and its singularity resolution.
Sequential Hierarchical Least-Squares Programming for Prioritized Non-Linear Optimal Control
Feb 23, 2023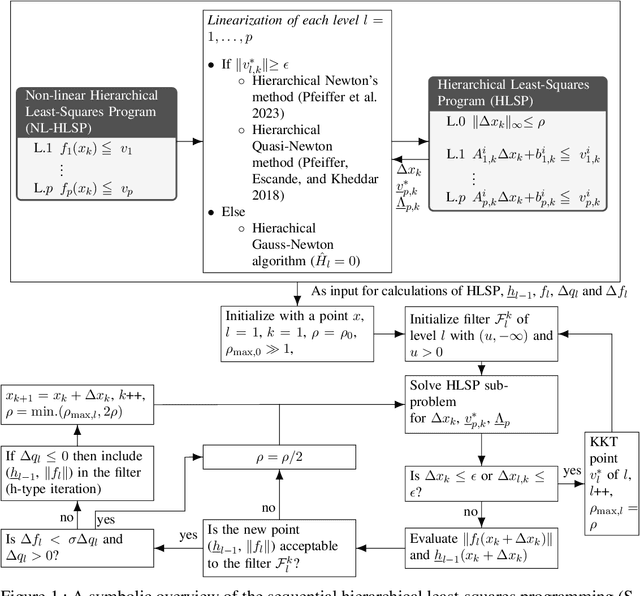
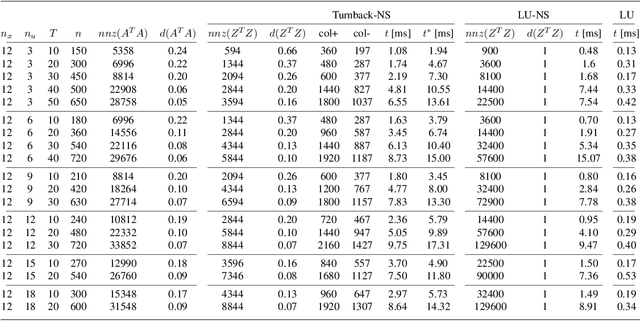
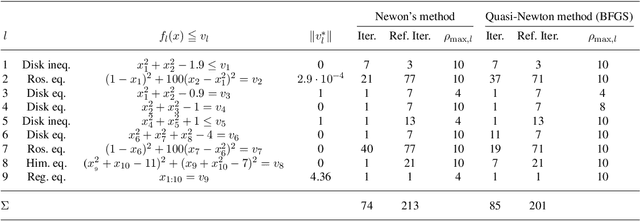
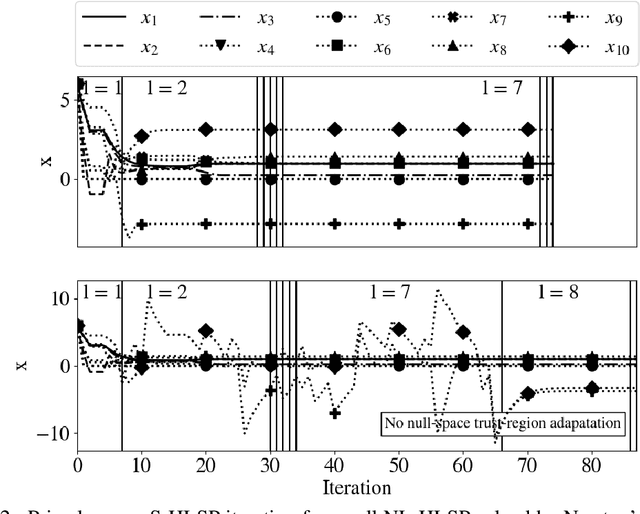
We present a sequential hierarchical least-squares programming solver with trust-region and hierarchical step-filter tailored to prioritized non-linear optimal control. It is based on a hierarchical step-filter which resolves each priority level of a non-linear hierarchical least-squares programming via a globally convergent sequential quadratic programming step-filter. Leveraging a condition on the trust-region or the filter initialization, our hierarchical step-filter maintains this global convergence property. The hierarchical least-squares programming sub-problems are solved via a sparse nullspace method based interior point method. It is based on an efficient implementation of the turnback algorithm for the computation of nullspace bases for banded matrices. It is also here that we propose a nullspace trust region adaptation method towards a comprehensive hierarchical step-filter. We demonstrate the computational efficiency of the hierarchical solver on typical test functions like the Rosenbrock and Himmelblau's functions, inverse kinematics problems and optimal control.