 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHumanoid Robot RHP Friends: Seamless Combination of Autonomous and Teleoperated Tasks in a Nursing Context
Dec 30, 2024



This paper describes RHP Friends, a social humanoid robot developed to enable assistive robotic deployments in human-coexisting environments. As a use-case application, we present its potential use in nursing by extending its capabilities to operate human devices and tools according to the task and by enabling remote assistance operations. To meet a wide variety of tasks and situations in environments designed by and for humans, we developed a system that seamlessly integrates the slim and lightweight robot and several technologies: locomanipulation, multi-contact motion, teleoperation, and object detection and tracking. We demonstrated the system's usage in a nursing application. The robot efficiently performed the daily task of patient transfer and a non-routine task, represented by a request to operate a circuit breaker. This demonstration, held at the 2023 International Robot Exhibition (IREX), conducted three times a day over three days.
The Kinetics Observer: A Tightly Coupled Estimator for Legged Robots
Jun 19, 2024



In this paper, we propose the "Kinetics Observer", a novel estimator addressing the challenge of state estimation for legged robots using proprioceptive sensors (encoders, IMU and force/torque sensors). Based on a Multiplicative Extended Kalman Filter, the Kinetics Observer allows the real-time simultaneous estimation of contact and perturbation forces, and of the robot's kinematics, which are accurate enough to perform proprioceptive odometry. Thanks to a visco-elastic model of the contacts linking their kinematics to the ones of the centroid of the robot, the Kinetics Observer ensures a tight coupling between the whole-body kinematics and dynamics of the robot. This coupling entails a redundancy of the measurements that enhances the robustness and the accuracy of the estimation. This estimator was tested on two humanoid robots performing long distance walking on even terrain and non-coplanar multi-contact locomotion.
Human-Robot Handovers using Task-Space Quadratic Programming
Jun 18, 2022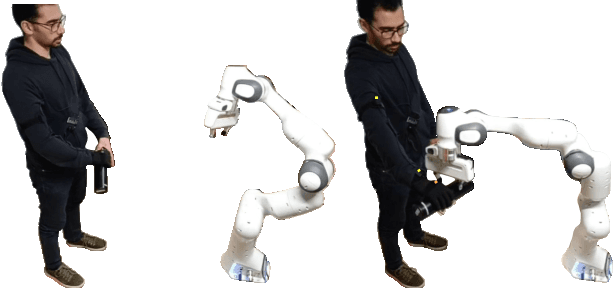
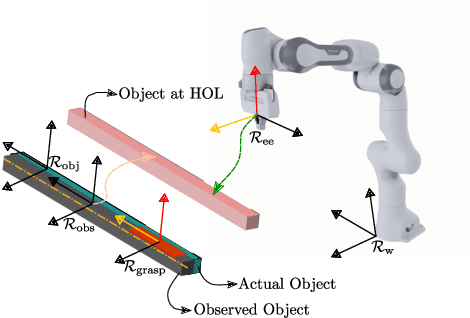

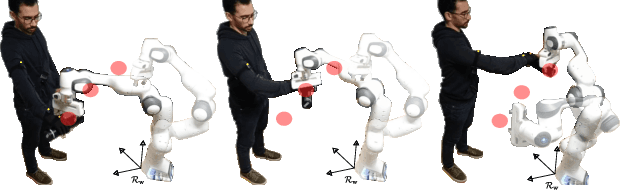
Bidirectional object handover between a human and a robot enables an important functionality skill in robotic human-centered manufacturing or services. The problem in achieving this skill lies in the capacity of any solution to deal with three important aspects: (i) synchronized timing for the handing over phases; (ii) the handling of object pose constraints; and (iii) understanding the haptic exchanging to seamlessly achieve some steps of the (i). We propose a new approach for (i) and (ii) consisting in explicitly formulating the handover process as constraints in a task-space quadratic programming control framework to achieve implicit time and trajectory encounters. Our method is implemented on Panda robotic arm taking objects from a human operator.