 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHumanoid Robot RHP Friends: Seamless Combination of Autonomous and Teleoperated Tasks in a Nursing Context
Dec 30, 2024



This paper describes RHP Friends, a social humanoid robot developed to enable assistive robotic deployments in human-coexisting environments. As a use-case application, we present its potential use in nursing by extending its capabilities to operate human devices and tools according to the task and by enabling remote assistance operations. To meet a wide variety of tasks and situations in environments designed by and for humans, we developed a system that seamlessly integrates the slim and lightweight robot and several technologies: locomanipulation, multi-contact motion, teleoperation, and object detection and tracking. We demonstrated the system's usage in a nursing application. The robot efficiently performed the daily task of patient transfer and a non-routine task, represented by a request to operate a circuit breaker. This demonstration, held at the 2023 International Robot Exhibition (IREX), conducted three times a day over three days.
The Kinetics Observer: A Tightly Coupled Estimator for Legged Robots
Jun 19, 2024



In this paper, we propose the "Kinetics Observer", a novel estimator addressing the challenge of state estimation for legged robots using proprioceptive sensors (encoders, IMU and force/torque sensors). Based on a Multiplicative Extended Kalman Filter, the Kinetics Observer allows the real-time simultaneous estimation of contact and perturbation forces, and of the robot's kinematics, which are accurate enough to perform proprioceptive odometry. Thanks to a visco-elastic model of the contacts linking their kinematics to the ones of the centroid of the robot, the Kinetics Observer ensures a tight coupling between the whole-body kinematics and dynamics of the robot. This coupling entails a redundancy of the measurements that enhances the robustness and the accuracy of the estimation. This estimator was tested on two humanoid robots performing long distance walking on even terrain and non-coplanar multi-contact locomotion.
Robust Task-Space Quadratic Programming for Kinematic-Controlled Robots
Jul 27, 2023



Task-space quadratic programming (QP) is an elegant approach for controlling robots subject to constraints. Yet, in the case of kinematic-controlled (i.e., high-gains position or velocity) robots, closed-loop QP control scheme can be prone to instability depending on how the gains related to the tasks or the constraints are chosen. In this paper, we address such instability shortcomings. First, we highlight the non-robustness of the closed-loop system against non-modeled dynamics, such as those relative to joint-dynamics, flexibilities, external perturbations, etc. Then, we propose a robust QP control formulation based on high-level integral feedback terms in the task-space including the constraints. The proposed method is formally proved to ensure closed-loop robust stability and is intended to be applied to any kinematic-controlled robots under practical assumptions. We assess our approach through experiments on a fixed-base robot performing stable fast motions, and a floating-base humanoid robot robustly reacting to perturbations to keep its balance.
The hierarchical Newton's method for numerically stable prioritized dynamic control
Mar 08, 2023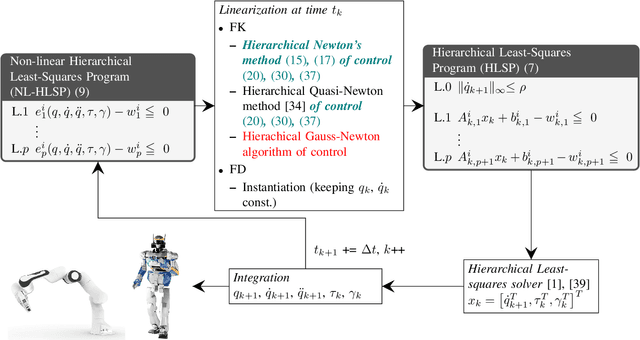
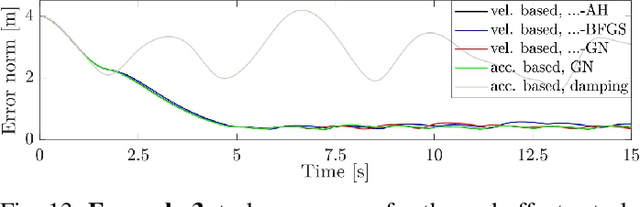
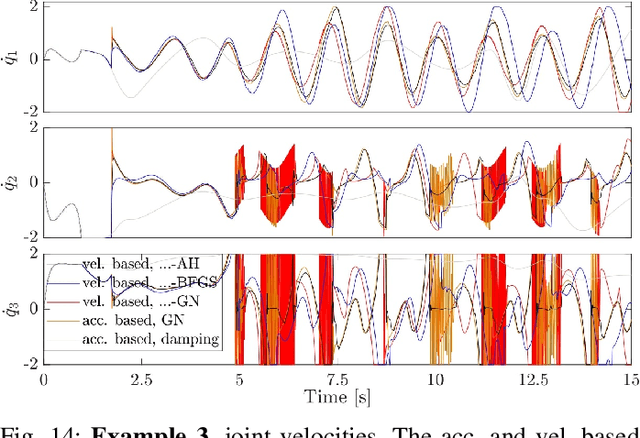
This work links optimization approaches from hierarchical least-squares programming to instantaneous prioritized whole-body robot control. Concretely, we formulate the hierarchical Newton's method which solves prioritized non-linear least-squares problems in a numerically stable fashion even in the presence of kinematic and algorithmic singularities of the approximated kinematic constraints. These results are then transferred to control problems which exhibit the additional variability of time. This is necessary in order to formulate acceleration based controllers and to incorporate the second order dynamics. However, we show that the Newton's method without complicated adaptations is not appropriate in the acceleration domain. We therefore formulate a velocity based controller which exhibits second order proportional derivative convergence characteristics. Our developments are verified in toy robot control scenarios as well as in complex robot experiments which stress the importance of prioritized control and its singularity resolution.
Learning Bipedal Walking for Humanoids with Current Feedback
Mar 07, 2023



Recent advances in deep reinforcement learning (RL) based techniques combined with training in simulation have offered a new approach to developing control policies for legged robots. However, the application of such approaches to real hardware has largely been limited to quadrupedal robots with direct-drive actuators and light-weight bipedal robots with low gear-ratio transmission systems. Application to life-sized humanoid robots has been elusive due to the large sim-to-real gap arising from their large size, heavier limbs, and a high gear-ratio transmission systems. In this paper, we present an approach for effectively overcoming the sim-to-real gap issue for humanoid robots arising from inaccurate torque tracking at the actuator level. Our key idea is to utilize the current feedback from the motors on the real robot, after training the policy in a simulation environment artificially degraded with poor torque tracking. Our approach successfully trains an end-to-end policy in simulation that can be deployed on a real HRP-5P humanoid robot for bipedal locomotion on challenging terrain. We also perform robustness tests on the RL policy and compare its performance against a conventional model-based controller for walking on uneven terrain. YouTube video: https://youtu.be/IeUaSsBRbNY
Human-Robot Handovers using Task-Space Quadratic Programming
Jun 18, 2022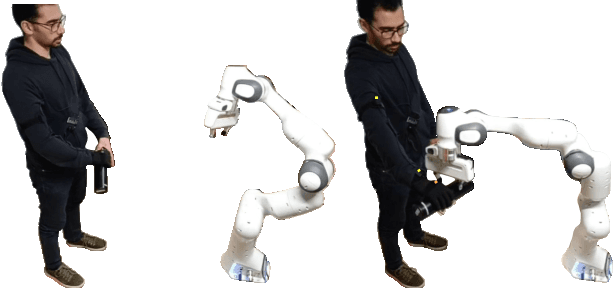
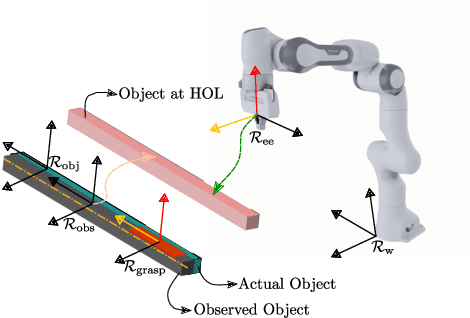

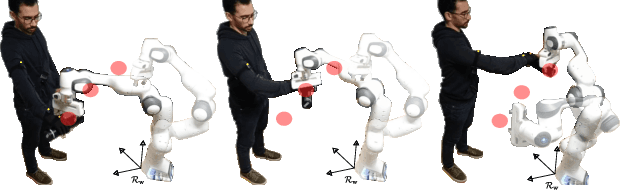
Bidirectional object handover between a human and a robot enables an important functionality skill in robotic human-centered manufacturing or services. The problem in achieving this skill lies in the capacity of any solution to deal with three important aspects: (i) synchronized timing for the handing over phases; (ii) the handling of object pose constraints; and (iii) understanding the haptic exchanging to seamlessly achieve some steps of the (i). We propose a new approach for (i) and (ii) consisting in explicitly formulating the handover process as constraints in a task-space quadratic programming control framework to achieve implicit time and trajectory encounters. Our method is implemented on Panda robotic arm taking objects from a human operator.
Task-Space Control Interface for SoftBank Humanoid Robots and its Human-Robot Interaction Applications
Oct 09, 2020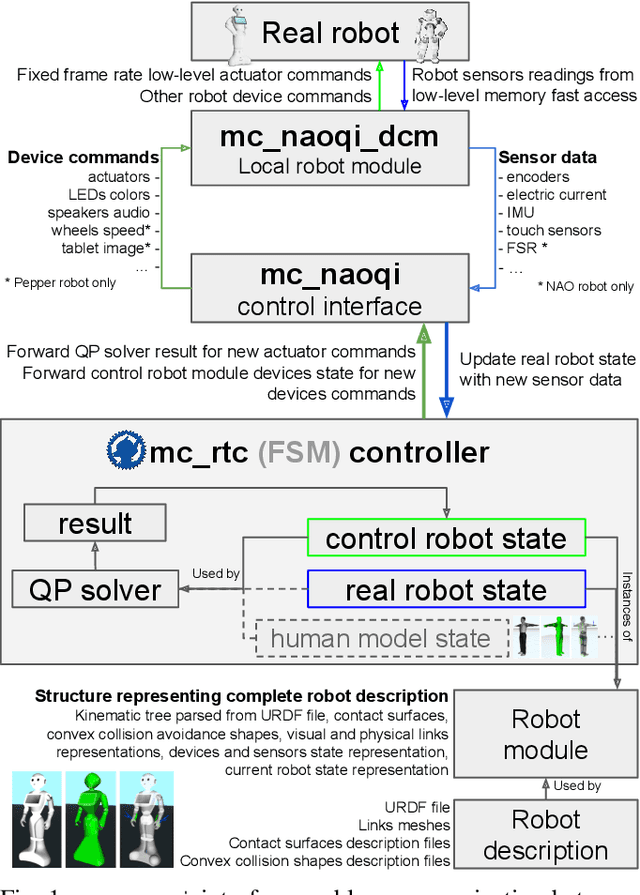


We present an open-source software interface, called mc_naoqi, that allows to perform whole-body task-space Quadratic Programming based control, implemented in mc_rtc framework, on the SoftBank Robotics Europe humanoid robots. We describe the control interface, associated robot description packages, robot modules and sample whole-body controllers. We demonstrate the use of these tools in simulation for a robot interacting with a human model. Finally, we showcase and discuss the use of the developed open-source tools for running the human-robot close contact interaction experiments with real human subjects inspired from assistance scenarios.
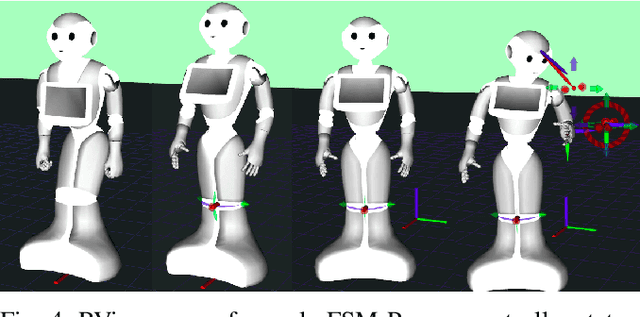
Impact-aware humanoid robot motion generation with a quadratic optimization controller
Jan 23, 2020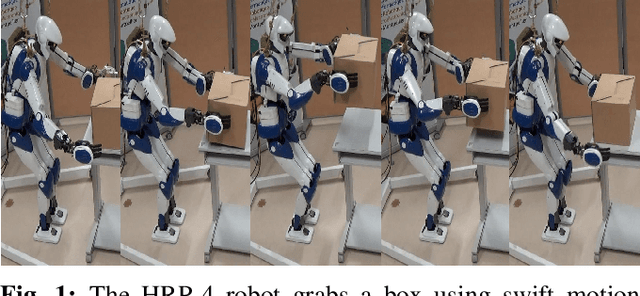

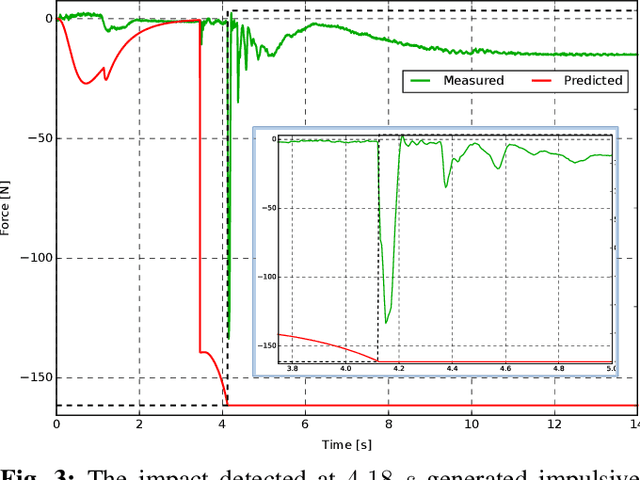
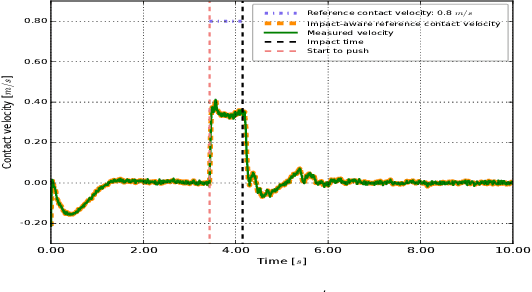
Impact-aware tasks (i.e. on purpose impacts) are not handled in multi-objective whole body controllers of hu-manoid robots. This leads to the fact that a humanoid robot typically operates at near-zero velocity to interact with the external environment. We explicitly investigate the propagation of the impact-induced velocity and torque jumps along the structure linkage and propose a set of constraints that always satisfy the hardware limits, sustain already established contacts and the stability measure, i.e. the zero moment point condition. Without assumptions on the impact location or timing, our proposed controller enables humanoid robots to generate non-zero contact velocity without breaking the established contacts or falling. The novelty of our approach lies in building on existing continuous dynamics whole body multi-objective controller without the need of reset-maps or hybrid control.