 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Task-Space Quadratic Programming for Kinematic-Controlled Robots
Jul 27, 2023



Task-space quadratic programming (QP) is an elegant approach for controlling robots subject to constraints. Yet, in the case of kinematic-controlled (i.e., high-gains position or velocity) robots, closed-loop QP control scheme can be prone to instability depending on how the gains related to the tasks or the constraints are chosen. In this paper, we address such instability shortcomings. First, we highlight the non-robustness of the closed-loop system against non-modeled dynamics, such as those relative to joint-dynamics, flexibilities, external perturbations, etc. Then, we propose a robust QP control formulation based on high-level integral feedback terms in the task-space including the constraints. The proposed method is formally proved to ensure closed-loop robust stability and is intended to be applied to any kinematic-controlled robots under practical assumptions. We assess our approach through experiments on a fixed-base robot performing stable fast motions, and a floating-base humanoid robot robustly reacting to perturbations to keep its balance.
Human-Robot Handovers using Task-Space Quadratic Programming
Jun 18, 2022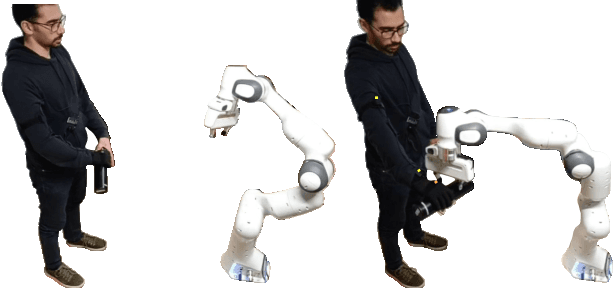
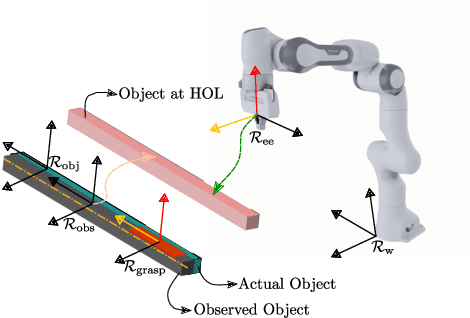

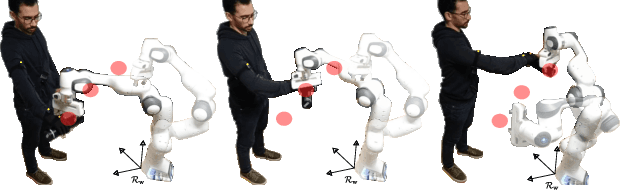
Bidirectional object handover between a human and a robot enables an important functionality skill in robotic human-centered manufacturing or services. The problem in achieving this skill lies in the capacity of any solution to deal with three important aspects: (i) synchronized timing for the handing over phases; (ii) the handling of object pose constraints; and (iii) understanding the haptic exchanging to seamlessly achieve some steps of the (i). We propose a new approach for (i) and (ii) consisting in explicitly formulating the handover process as constraints in a task-space quadratic programming control framework to achieve implicit time and trajectory encounters. Our method is implemented on Panda robotic arm taking objects from a human operator.