 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman-Robot Handovers using Task-Space Quadratic Programming
Jun 18, 2022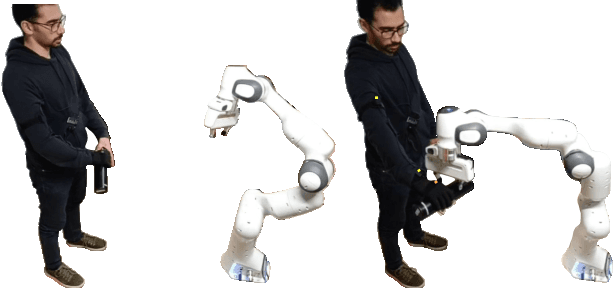
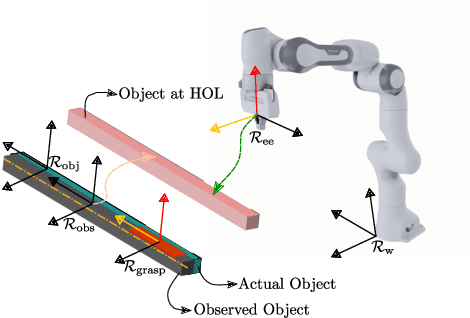

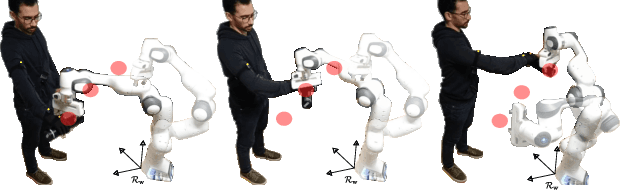
Bidirectional object handover between a human and a robot enables an important functionality skill in robotic human-centered manufacturing or services. The problem in achieving this skill lies in the capacity of any solution to deal with three important aspects: (i) synchronized timing for the handing over phases; (ii) the handling of object pose constraints; and (iii) understanding the haptic exchanging to seamlessly achieve some steps of the (i). We propose a new approach for (i) and (ii) consisting in explicitly formulating the handover process as constraints in a task-space quadratic programming control framework to achieve implicit time and trajectory encounters. Our method is implemented on Panda robotic arm taking objects from a human operator.