 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQP-Based Control of an Underactuated Aerial Manipulator under Constraints
Jan 13, 2026This paper presents a constraint-aware control framework for underactuated aerial manipulators, enabling accurate end-effector trajectory tracking while explicitly accounting for safety and feasibility constraints. The control problem is formulated as a quadratic program that computes dynamically consistent generalized accelerations subject to underactuation, actuator bounds, and system constraints. To enhance robustness against disturbances, modeling uncertainties, and steady-state errors, a passivity-based integral action is incorporated at the torque level without compromising feasibility. The effectiveness of the proposed approach is demonstrated through high-fidelity physics-based simulations, which include parameter perturbations, viscous joint friction, and realistic sensing and state-estimation effects. This demonstrates accurate tracking, smooth control inputs, and reliable constraint satisfaction under realistic operating conditions.
The Kinetics Observer: A Tightly Coupled Estimator for Legged Robots
Jun 19, 2024



In this paper, we propose the "Kinetics Observer", a novel estimator addressing the challenge of state estimation for legged robots using proprioceptive sensors (encoders, IMU and force/torque sensors). Based on a Multiplicative Extended Kalman Filter, the Kinetics Observer allows the real-time simultaneous estimation of contact and perturbation forces, and of the robot's kinematics, which are accurate enough to perform proprioceptive odometry. Thanks to a visco-elastic model of the contacts linking their kinematics to the ones of the centroid of the robot, the Kinetics Observer ensures a tight coupling between the whole-body kinematics and dynamics of the robot. This coupling entails a redundancy of the measurements that enhances the robustness and the accuracy of the estimation. This estimator was tested on two humanoid robots performing long distance walking on even terrain and non-coplanar multi-contact locomotion.
Lyapunov-Stable Orientation Estimator for Humanoid Robots
Oct 09, 2020



In this paper, we present an observation scheme, with proven Lyapunov stability, for estimating a humanoid's floating base orientation. The idea is to use velocity aided attitude estimation, which requires to know the velocity of the system. This velocity can be obtained by taking into account the kinematic data provided by contact information with the environment and using the IMU and joint encoders. We demonstrate how this operation can be used in the case of a fixed or a moving contact, allowing it to be employed for locomotion. We show how to use this velocity estimation within a selected two-stage state tilt estimator: (i) the first which has a global and quick convergence (ii) and the second which has smooth and robust dynamics. We provide new specific proofs of almost global Lyapunov asymptotic stability and local exponential convergence for this observer. Finally, we assess its performance by employing a comparative simulation and by using it within a closed-loop stabilization scheme for HRP-5P and HRP-2KAI robots performing whole-body kinematic tasks and locomotion.
Tilt estimator for 3D non-rigid pendulum based on a tri-axial accelerometer and gyrometer
Oct 31, 2018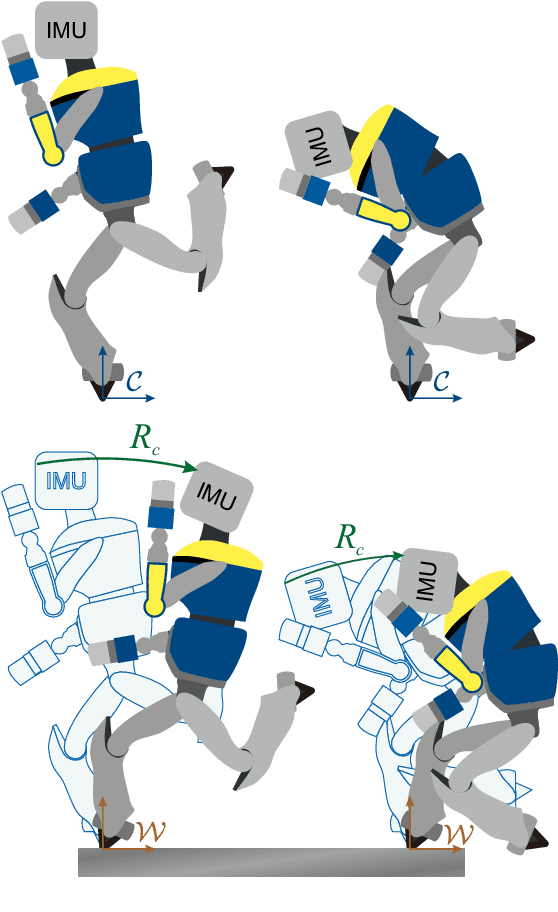



The paper presents a new observer for tilt estimation of a 3-D non-rigid pendulum. The system can be seen as a multibody robot attached to the environment with a ball joint. There is no sensor for the joint position of the sensor. The estimation of tilt, i.e. roll and pitch angles, is mandatory for balance control for a humanoid robot and all tasks requiring verticality. Our method obtains tilt estimations using encoders on other joints and inertial measurements given by an IMU equipped with tri-axial accelerometer and gyrometer mounted in any body of the robot. The estimator takes profit from the kinematic coupling resulting from the pivot constraint and uses the entire signal of accelerometer including linear accelerations. Almost Global Asymptotic convergence of the estimation errors is proven together with local exponential stability. The performance of the proposed observer is illustrated by simulations.