 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReproducing sensory induced hallucinations via neural fields
Jul 08, 2022



Understanding sensory-induced cortical patterns in the primary visual cortex V1 is an important challenge both for physiological motivations and for improving our understanding of human perception and visual organisation. In this work, we focus on pattern formation in the visual cortex when the cortical activity is driven by a geometric visual hallucination-like stimulus. In particular, we present a theoretical framework for sensory-induced hallucinations which allows one to reproduce novel psychophysical results such as the MacKay effect (Nature, 1957) and the Billock and Tsou experiences (PNAS, 2007).
Lyapunov-Stable Orientation Estimator for Humanoid Robots
Oct 09, 2020



In this paper, we present an observation scheme, with proven Lyapunov stability, for estimating a humanoid's floating base orientation. The idea is to use velocity aided attitude estimation, which requires to know the velocity of the system. This velocity can be obtained by taking into account the kinematic data provided by contact information with the environment and using the IMU and joint encoders. We demonstrate how this operation can be used in the case of a fixed or a moving contact, allowing it to be employed for locomotion. We show how to use this velocity estimation within a selected two-stage state tilt estimator: (i) the first which has a global and quick convergence (ii) and the second which has smooth and robust dynamics. We provide new specific proofs of almost global Lyapunov asymptotic stability and local exponential convergence for this observer. Finally, we assess its performance by employing a comparative simulation and by using it within a closed-loop stabilization scheme for HRP-5P and HRP-2KAI robots performing whole-body kinematic tasks and locomotion.
A Geometric Approach of Gradient Descent Algorithms in Neural Networks
Nov 08, 2018
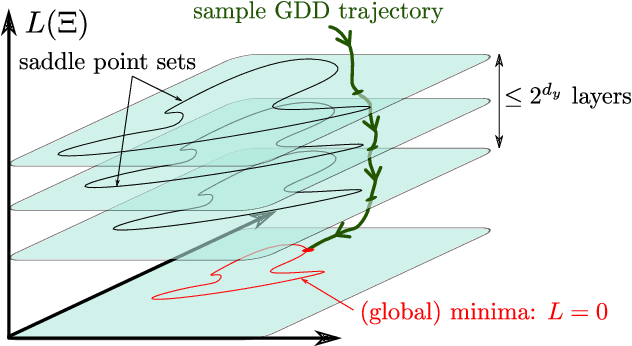

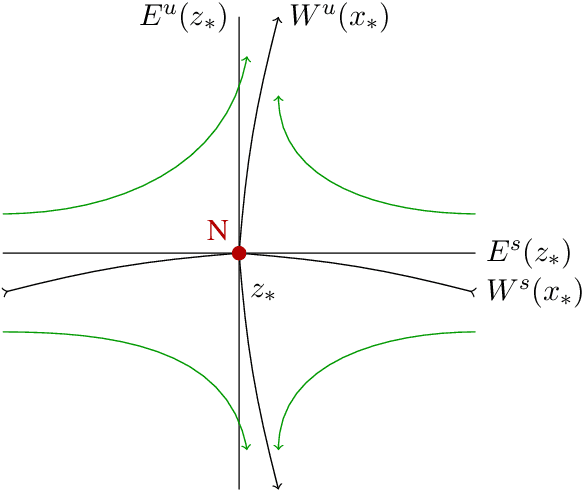
In this article we present a geometric framework to analyze convergence of gradient descent trajectories in the context of neural networks. In the case of linear networks of an arbitrary number of hidden layers, we characterize appropriate quantities which are conserved along the gradient descent system (GDS). We use them to prove boundedness of every trajectory of the GDS, which implies convergence to a critical point. We further focus on the local behavior in the neighborhood of each critical points and perform a study on the associated basin of attractions so as to measure the "possibility" of converging to saddle points and local minima.
Tilt estimator for 3D non-rigid pendulum based on a tri-axial accelerometer and gyrometer
Oct 31, 2018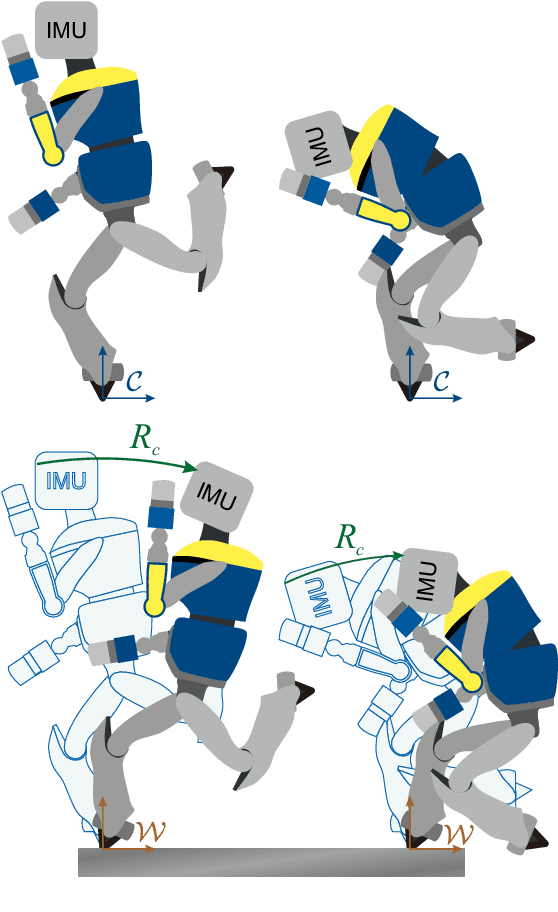



The paper presents a new observer for tilt estimation of a 3-D non-rigid pendulum. The system can be seen as a multibody robot attached to the environment with a ball joint. There is no sensor for the joint position of the sensor. The estimation of tilt, i.e. roll and pitch angles, is mandatory for balance control for a humanoid robot and all tasks requiring verticality. Our method obtains tilt estimations using encoders on other joints and inertial measurements given by an IMU equipped with tri-axial accelerometer and gyrometer mounted in any body of the robot. The estimator takes profit from the kinematic coupling resulting from the pivot constraint and uses the entire signal of accelerometer including linear accelerations. Almost Global Asymptotic convergence of the estimation errors is proven together with local exponential stability. The performance of the proposed observer is illustrated by simulations.