 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHumanoid Loco-Manipulations Pattern Generation and Stabilization Control
May 30, 2025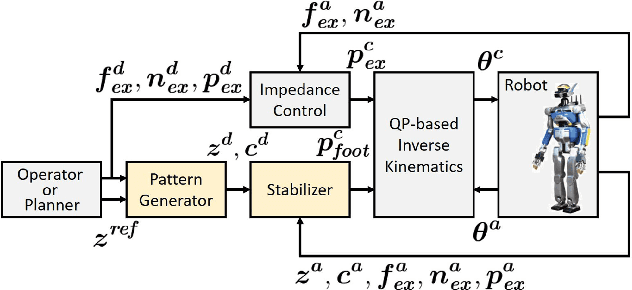



In order for a humanoid robot to perform loco-manipulation such as moving an object while walking, it is necessary to account for sustained or alternating external forces other than ground-feet reaction, resulting from humanoid-object contact interactions. In this letter, we propose a bipedal control strategy for humanoid loco-manipulation that can cope with such external forces. First, the basic formulas of the bipedal dynamics, i.e., linear inverted pendulum mode and divergent component of motion, are derived, taking into account the effects of external manipulation forces. Then, we propose a pattern generator to plan center of mass trajectories consistent with the reference trajectory of the manipulation forces, and a stabilizer to compensate for the error between desired and actual manipulation forces. The effectiveness of our controller is assessed both in simulation and loco-manipulation experiments with real humanoid robots.
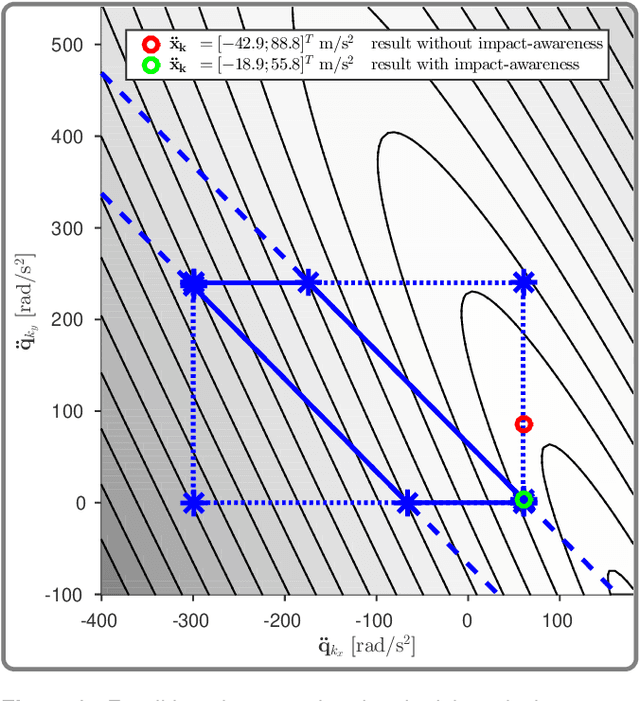
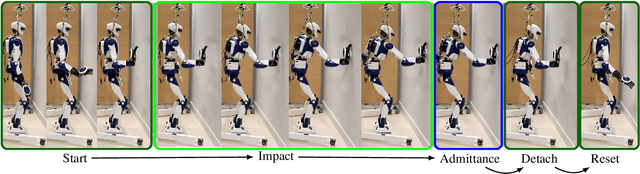
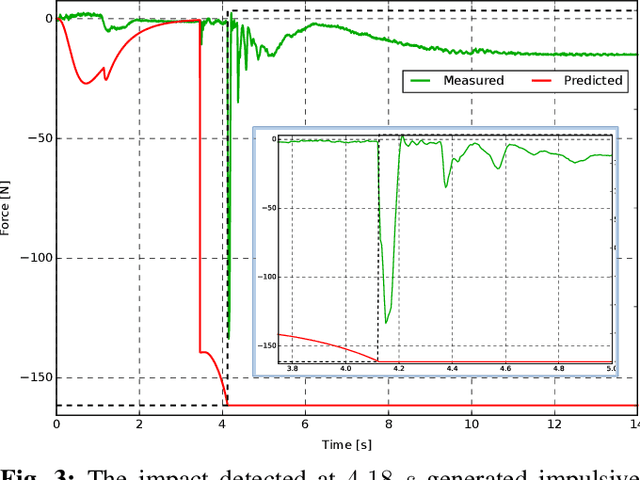
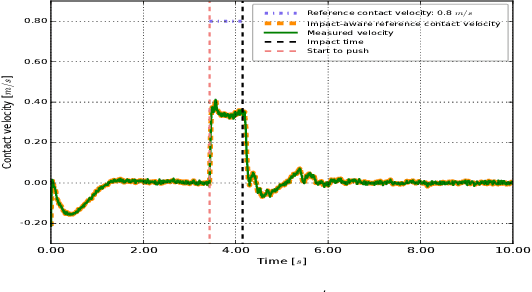
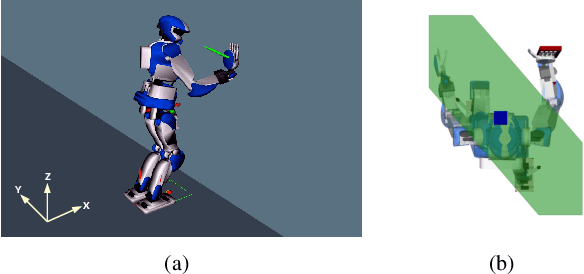
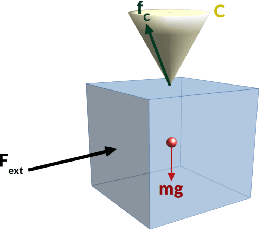
Impact-Aware Multi-Contact Balance Criteria
Aug 13, 2023



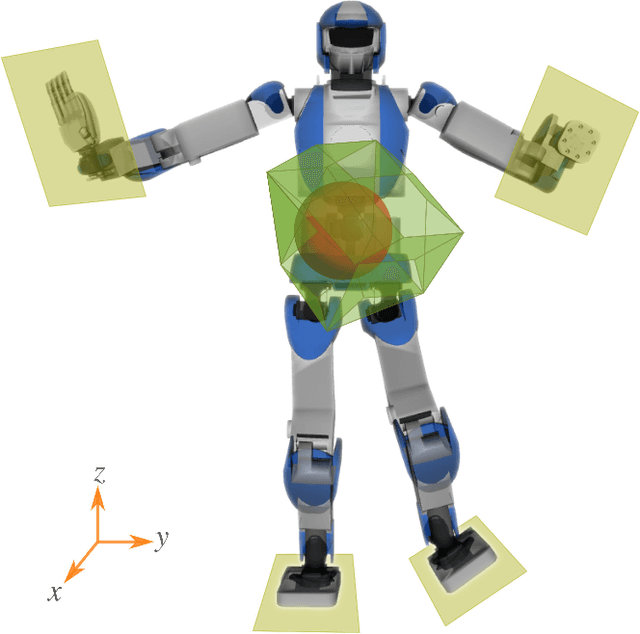
Intentionally applying impacts while maintaining balance is challenging for legged robots. This study originated from observing experimental data of the humanoid robot HRP-4 intentionally hitting a wall with its right arm while standing on two feet. Strangely, violating the usual zero moment point balance criteria did not systematically result in a fall. To investigate this phenomenon, we propose the zero-step capture region for non-coplanar contacts, defined as the center of mass (CoM) velocity area, and validated it with push-recovery experiments employing the HRP-4 balancing on two non-coplanar contacts. To further enable on-purpose impacts, we compute the set of candidate post-impact CoM velocities accounting for frictional-impact dynamics in three dimensions, and restrict the entire set within the CoM velocity area to maintain balance with the sustained contacts during and after impacts. We illustrate the maximum contact velocity for various HRP-4 stances in simulation, indicating potential for integration into other task-space whole-body controllers or planners. This study is the first to address the challenging problem of applying an intentional impact with a kinematic-controlled humanoid robot on non-coplanar contacts.
Enhanced Visual Feedback with Decoupled Viewpoint Control in Immersive Humanoid Robot Teleoperation using SLAM
Nov 03, 2022



In immersive humanoid robot teleoperation, there are three main shortcomings that can alter the transparency of the visual feedback: the lag between the motion of the operator's and robot's head due to network communication delays or slow robot joint motion. This latency could cause a noticeable delay in the visual feedback, which jeopardizes the embodiment quality, can cause dizziness, and affects the interactivity resulting in operator frequent motion pauses for the visual feedback to settle; (ii) the mismatch between the camera's and the headset's field-of-views (FOV), the former having generally a lower FOV; and (iii) a mismatch between human's and robot's range of motions of the neck, the latter being also generally lower. In order to leverage these drawbacks, we developed a decoupled viewpoint control solution for a humanoid platform which allows visual feedback with low-latency and artificially increases the camera's FOV range to match that of the operator's headset. Our novel solution uses SLAM technology to enhance the visual feedback from a reconstructed mesh, complementing the areas that are not covered by the visual feedback from the robot. The visual feedback is presented as a point cloud in real-time to the operator. As a result, the operator is fed with real-time vision from the robot's head orientation by observing the pose of the point cloud. Balancing this kind of awareness and immersion is important in virtual reality based teleoperation, considering the safety and robustness of the control system. An experiment shows the effectiveness of our solution.
Humanoid Control Under Interchangeable Fixed and Sliding Unilateral Contacts
Mar 04, 2021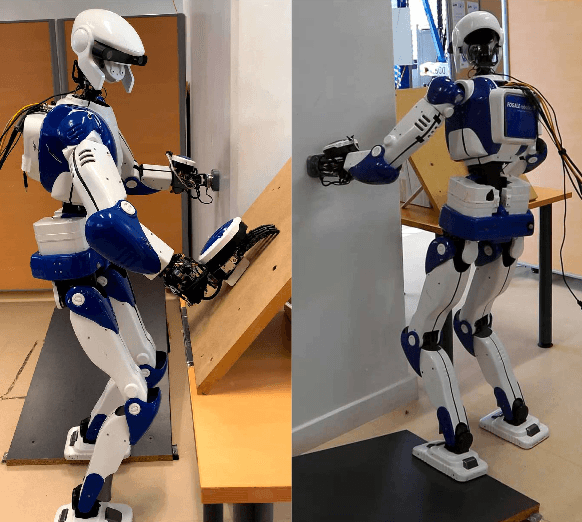
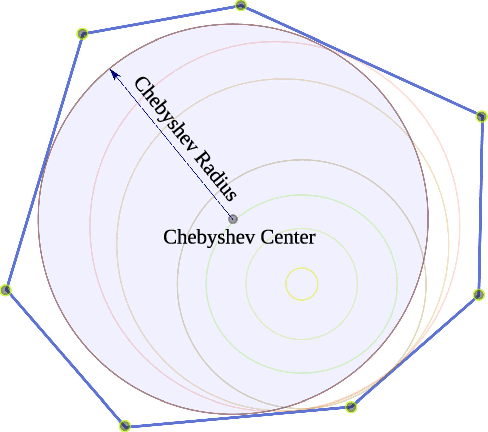
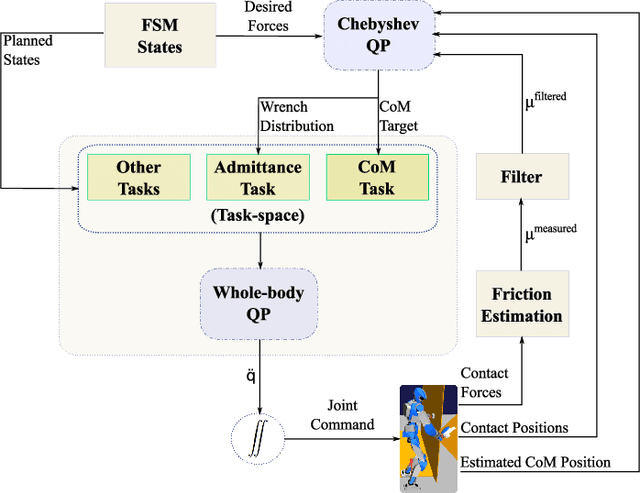
In this letter, we propose a whole-body control strategy for humanoid robots in multi-contact settings that enables switching between fixed and sliding contacts under active balance. We compute, in real-time, a safe center-of-mass position and wrench distribution of the contact points based on the Chebyshev center. Our solution is formulated as a quadratic programming problem without a priori computation of balance regions. We assess our approach with experiments highlighting switches between fixed and sliding contact modes in multi-contact configurations. A humanoid robot demonstrates such contact interchanges from fully-fixed to multi-sliding and also shuffling of the foot. The scenarios illustrate the performance of our control scheme in achieving the desired forces, CoM position attractor, and planned trajectories while actively maintaining balance.
Task-Space Control Interface for SoftBank Humanoid Robots and its Human-Robot Interaction Applications
Oct 09, 2020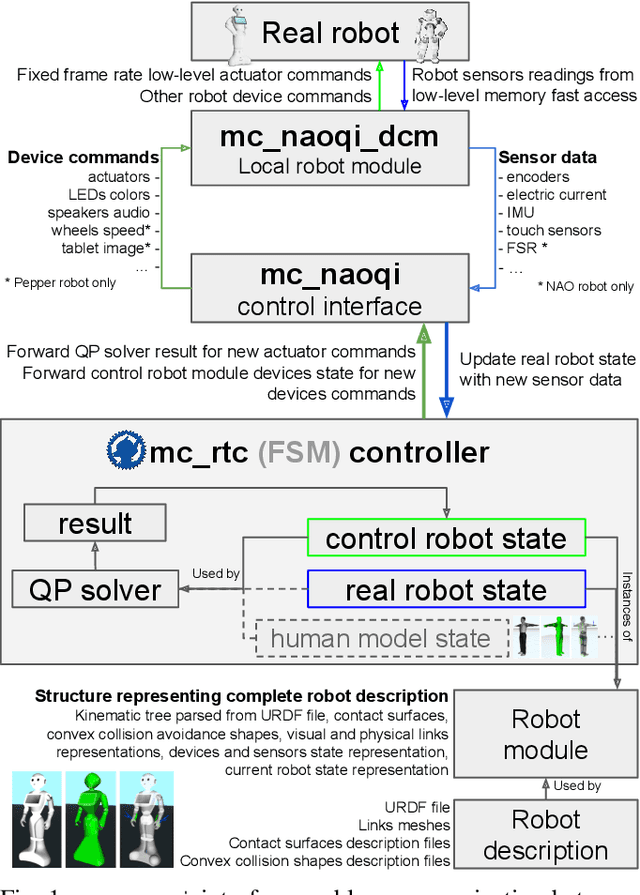


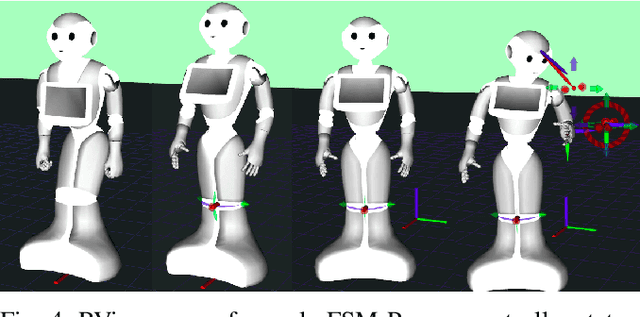
We present an open-source software interface, called mc_naoqi, that allows to perform whole-body task-space Quadratic Programming based control, implemented in mc_rtc framework, on the SoftBank Robotics Europe humanoid robots. We describe the control interface, associated robot description packages, robot modules and sample whole-body controllers. We demonstrate the use of these tools in simulation for a robot interacting with a human model. Finally, we showcase and discuss the use of the developed open-source tools for running the human-robot close contact interaction experiments with real human subjects inspired from assistance scenarios.
Impact-Aware Task-Space Quadratic-Programming Control
Jun 03, 2020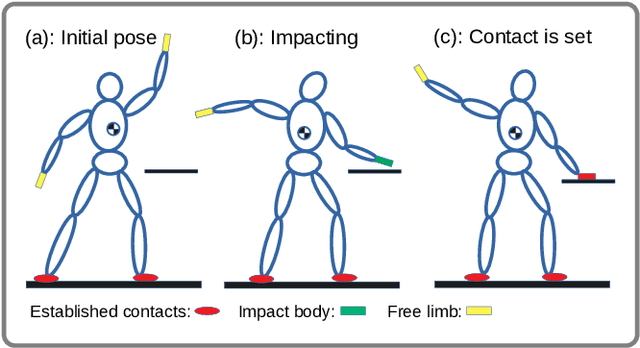
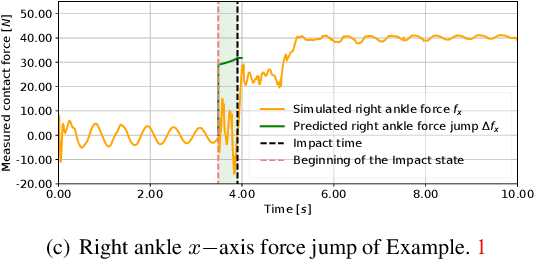
Generating on-purpose impacts with rigid robots is challenging as they may lead to severe hardware failures due to abrupt changes in the velocities and torques. Without dedicated hardware and controllers, robots typically operate at a near-zero velocity in the vicinity of contacts. We assume knowing how much of impact the hardware can absorb and focus solely on the controller aspects. Hybrid controllers with reset maps provided elegant solutions for given impact tasks. The novelty of our approach is twofold: (i) it uses the task-space inverse dynamics formalism that we extend by seamlessly integrating impact tasks; (ii) it does not require separate models with switches or a reset map to operate the robot undergoing impact tasks. Our main idea lies in integrating post-impact states prediction and impact-aware inequality constraints as part of our existing general-purpose whole-body controller. To achieve such prediction, we formulate task-space impacts and its spreading along the kinematic and potentially arborescent, structure of a floating-base robot with subsequent joint velocity and torque jumps. As a result, the feasible solution set accounts for various constraints due to expected impacts. In a multi-contact situation of under-actuated legged robots subject to multiple impacts, we also enforce the dynamic equilibrium margins. By design, our controller does not require precise knowledge of impact location and timing. We assessed our formalism with the humanoid robot HRP-4, generating maximum contact velocities, neither breaking established contacts nor damaging the hardware.
Impact-aware humanoid robot motion generation with a quadratic optimization controller
Jan 23, 2020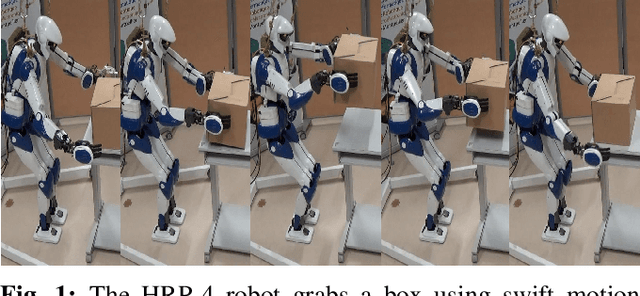

Impact-aware tasks (i.e. on purpose impacts) are not handled in multi-objective whole body controllers of hu-manoid robots. This leads to the fact that a humanoid robot typically operates at near-zero velocity to interact with the external environment. We explicitly investigate the propagation of the impact-induced velocity and torque jumps along the structure linkage and propose a set of constraints that always satisfy the hardware limits, sustain already established contacts and the stability measure, i.e. the zero moment point condition. Without assumptions on the impact location or timing, our proposed controller enables humanoid robots to generate non-zero contact velocity without breaking the established contacts or falling. The novelty of our approach lies in building on existing continuous dynamics whole body multi-objective controller without the need of reset-maps or hybrid control.
Balance of Humanoid robot in Multi-contact and Sliding Scenarios
Sep 30, 2019

This study deals with the balance of humanoid or multi-legged robots in a multi-contact setting where a chosen subset of contacts is undergoing desired sliding-task motions. One method to keep balance is to hold the center-of-mass (CoM) within an admissible convex area. This area should be calculated based on the contact positions and forces. We introduce a methodology to compute this CoM support area (CSA) for multiple fixed and sliding contacts. To select the most appropriate CoM position inside CSA, we account for (i) constraints of multiple fixed and sliding contacts, (ii) desired wrench distribution for contacts, and (iii) desired position of CoM (eventually dictated by other tasks). These are formulated as a quadratic programming optimization problem. We illustrate our approach with pushing against a wall and wiping and conducted experiments using the HRP-4 humanoid robot.