 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShared Object Manipulation with a Team of Collaborative Quadrupeds
Oct 01, 2025
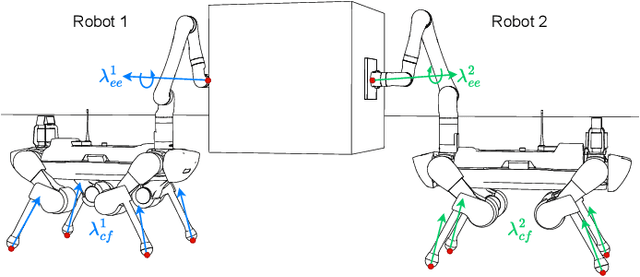
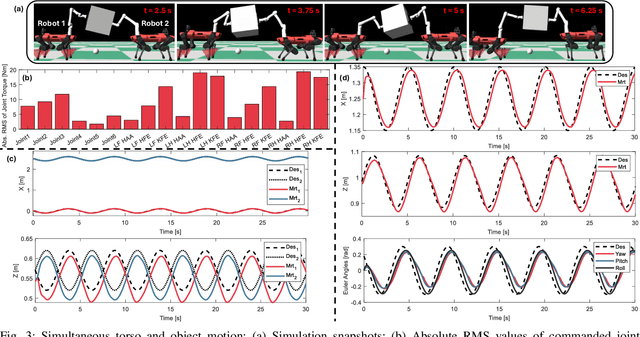
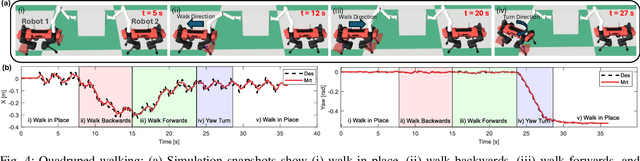
Utilizing teams of multiple robots is advantageous for handling bulky objects. Many related works focus on multi-manipulator systems, which are limited by workspace constraints. In this paper, we extend a classical hybrid motion-force controller to a team of legged manipulator systems, enabling collaborative loco-manipulation of rigid objects with a force-closed grasp. Our novel approach allows the robots to flexibly coordinate their movements, achieving efficient and stable object co-manipulation and transport, validated through extensive simulations and real-world experiments.
Robot Cell Modeling via Exploratory Robot Motions
Feb 03, 2025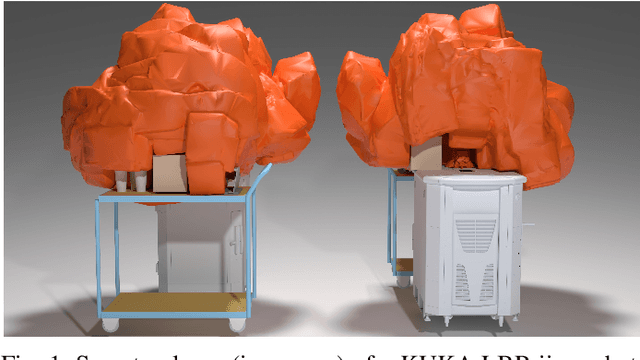

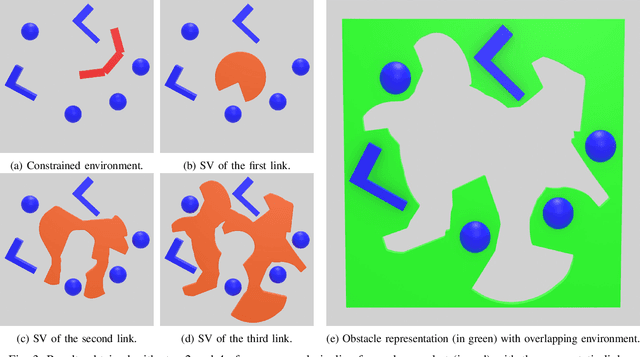
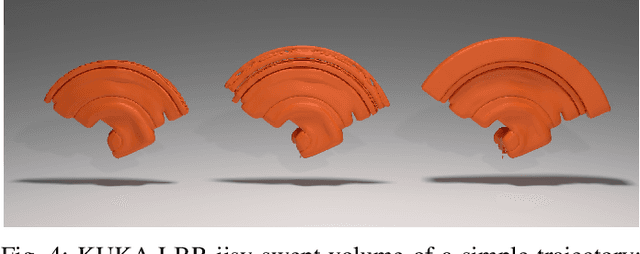
Generating a collision-free robot motion is crucial for safe applications in real-world settings. This requires an accurate model of all obstacle shapes within the constrained robot cell, which is particularly challenging and time-consuming. The difficulty is heightened in flexible production lines, where the environment model must be updated each time the robot cell is modified. Furthermore, sensor-based methods often necessitate costly hardware and calibration procedures, and can be influenced by environmental factors (e.g., light conditions or reflections). To address these challenges, we present a novel data-driven approach to modeling a cluttered workspace, leveraging solely the robot internal joint encoders to capture exploratory motions. By computing the corresponding swept volume, we generate a (conservative) mesh of the environment that is subsequently used for collision checking within established path planning and control methods. Our method significantly reduces the complexity and cost of classical environment modeling by removing the need for CAD files and external sensors. We validate the approach with the KUKA LBR iisy collaborative robot in a pick-and-place scenario. In less than three minutes of exploratory robot motions and less than four additional minutes of computation time, we obtain an accurate model that enables collision-free motions. Our approach is intuitive, easy-to-use, making it accessible to users without specialized technical knowledge. It is applicable to all types of industrial robots or cobots.
Task-Parameterized Imitation Learning with Time-Sensitive Constraints
Dec 06, 2023



Programming a robot manipulator should be as intuitive as possible. To achieve that, the paradigm of teaching motion skills by providing few demonstrations has become widely popular in recent years. Probabilistic versions thereof take into account the uncertainty given by the distribution of the training data. However, precise execution of start-, via-, and end-poses at given times can not always be guaranteed. This limits the technology transfer to industrial application. To address this problem, we propose a novel constrained formulation of the Expectation Maximization algorithm for learning Gaussian Mixture Models (GMM) on Riemannian Manifolds. Our approach applies to probabilistic imitation learning and extends also to the well-established TP-GMM framework with Task-Parameterization. It allows to prescribe end-effector poses at defined execution times, for instance for precise pick & place scenarios. The probabilistic approach is compared with state-of-the-art learning-from-demonstration methods using the KUKA LBR iiwa robot. The reader is encouraged to watch the accompanying video available at https://youtu.be/JMI1YxtN9C0
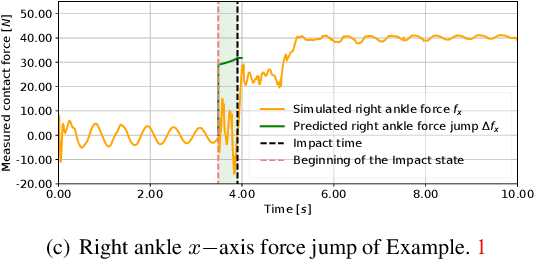
Predicting Impact-Induced Joint Velocity Jumps on Kinematic-Controlled Manipulator
Feb 25, 2022
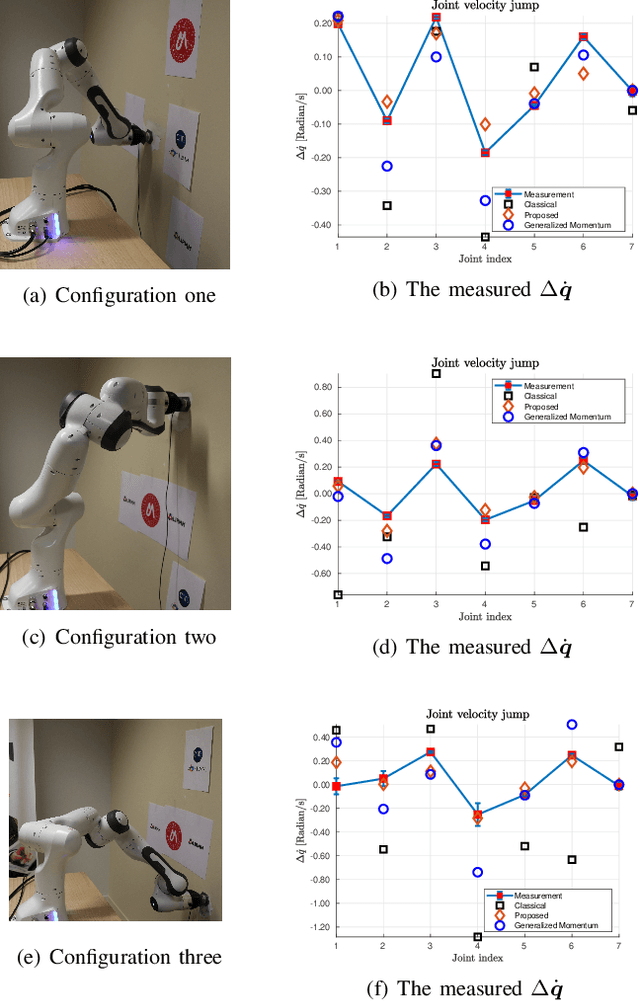
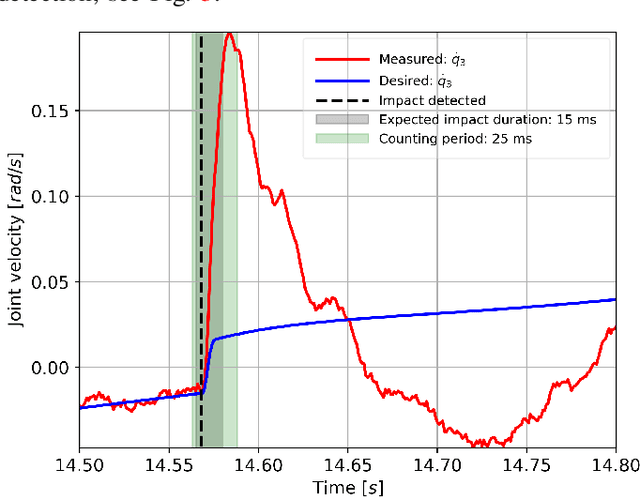

In order to enable on-purpose robotic impact tasks, predicting joint-velocity jumps is essential to enforce controller feasibility and hardware integrity. We observe a considerable prediction error of a commonly-used approach in robotics compared against 250 benchmark experiments with the Panda manipulator. We reduce the average prediction error by 81.98% as follows: First, we focus on task-space equations without inverting the ill-conditioned joint-space inertia matrix. Second, before the impact event, we compute the equivalent inertial properties of the end-effector tip considering that a high-gains (stiff) kinematic-controlled manipulator behaves like a composite-rigid body.
On Inverse Inertia Matrix and Contact-Force Model for Robotic Manipulators at Normal Impacts
Sep 10, 2021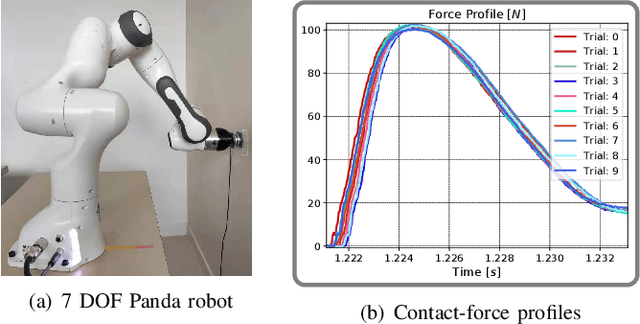
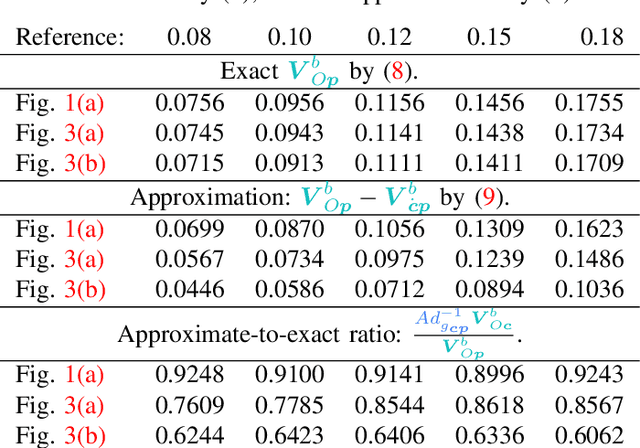

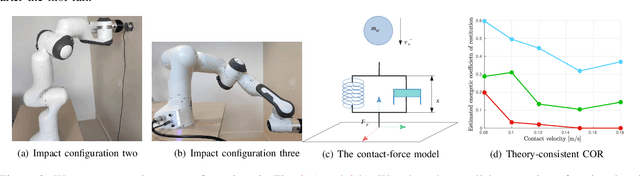
We revisit the impact with zero tangential contact velocities caused by an articulated robot arm contacting its rigid environment. The impact behavior depends on the fixed base and multiple rigid links connected by motorized joints. Our thorough analysis focuses on deriving the suitable inverse inertia matrix and a realistic contact-force model. We conducted real-robot experiments with the 7 DOF Panda manipulator, collecting data of 150 impacts with varying joint configurations and different end-effector speeds. Our findings suggest computing the inverse inertia matrix assuming the joints are locked, i.e., transform the composite-rigid-body inertia at the contact point, and the measurement-consistent contact-force model is viscoelastic.
Impact-Aware Task-Space Quadratic-Programming Control
Jun 03, 2020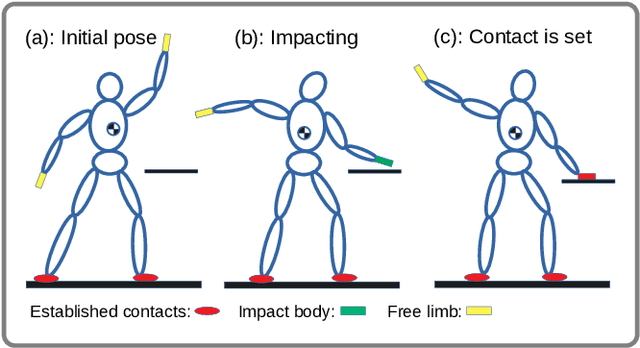
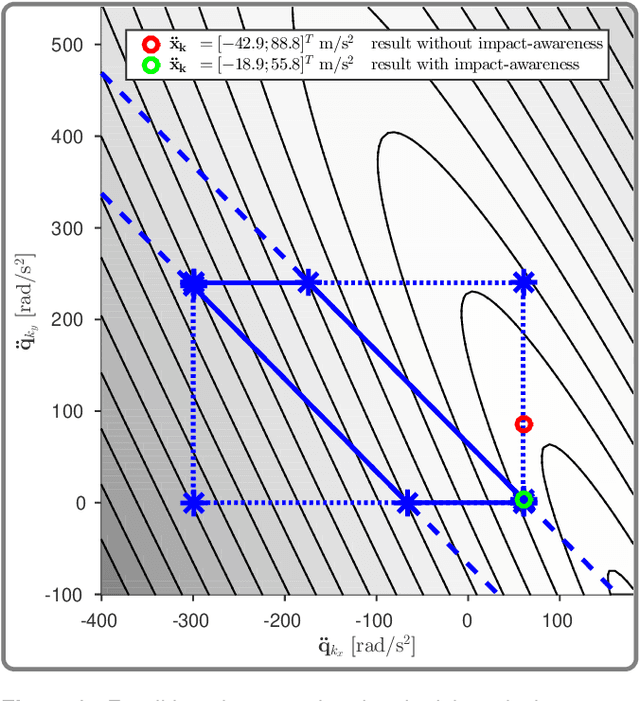
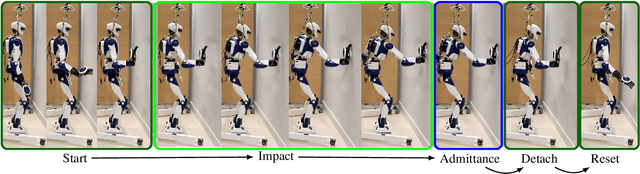
Generating on-purpose impacts with rigid robots is challenging as they may lead to severe hardware failures due to abrupt changes in the velocities and torques. Without dedicated hardware and controllers, robots typically operate at a near-zero velocity in the vicinity of contacts. We assume knowing how much of impact the hardware can absorb and focus solely on the controller aspects. Hybrid controllers with reset maps provided elegant solutions for given impact tasks. The novelty of our approach is twofold: (i) it uses the task-space inverse dynamics formalism that we extend by seamlessly integrating impact tasks; (ii) it does not require separate models with switches or a reset map to operate the robot undergoing impact tasks. Our main idea lies in integrating post-impact states prediction and impact-aware inequality constraints as part of our existing general-purpose whole-body controller. To achieve such prediction, we formulate task-space impacts and its spreading along the kinematic and potentially arborescent, structure of a floating-base robot with subsequent joint velocity and torque jumps. As a result, the feasible solution set accounts for various constraints due to expected impacts. In a multi-contact situation of under-actuated legged robots subject to multiple impacts, we also enforce the dynamic equilibrium margins. By design, our controller does not require precise knowledge of impact location and timing. We assessed our formalism with the humanoid robot HRP-4, generating maximum contact velocities, neither breaking established contacts nor damaging the hardware.
A Projected Inverse Dynamics Approach for Dual-arm Cartesian Impedance Control
Jul 03, 2017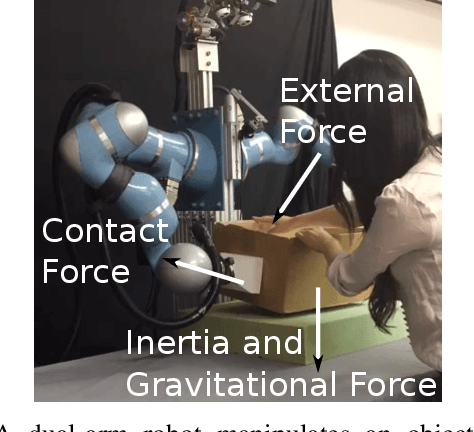
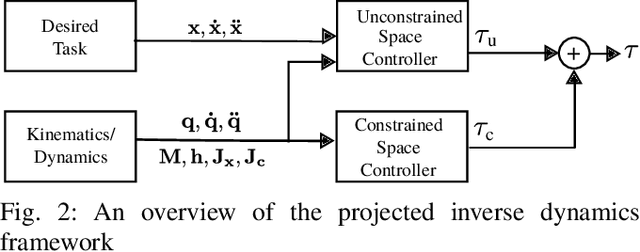
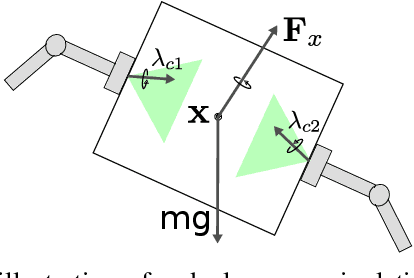
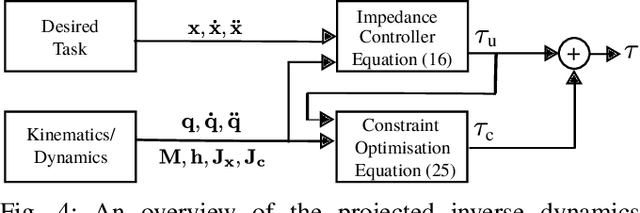
We propose a method for dual-arm manipulation of rigid objects, subject to external disturbance. The problem is formulated as a Cartesian impedance controller within a projected inverse dynamics framework. We use the constrained component of the controller to enforce contact and the unconstrained controller to accomplish the task with a desired 6-DOF impedance behaviour. Furthermore, the proposed method optimises the torque required to maintain contact, subject to unknown disturbances, and can do so without direct measurement of external force. The techniques are evaluated on a single-arm wiping a table and a dual-arm platform manipulating a rigid object of unknown mass and with human interaction.