 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTask-Parameterized Imitation Learning with Time-Sensitive Constraints
Dec 06, 2023



Programming a robot manipulator should be as intuitive as possible. To achieve that, the paradigm of teaching motion skills by providing few demonstrations has become widely popular in recent years. Probabilistic versions thereof take into account the uncertainty given by the distribution of the training data. However, precise execution of start-, via-, and end-poses at given times can not always be guaranteed. This limits the technology transfer to industrial application. To address this problem, we propose a novel constrained formulation of the Expectation Maximization algorithm for learning Gaussian Mixture Models (GMM) on Riemannian Manifolds. Our approach applies to probabilistic imitation learning and extends also to the well-established TP-GMM framework with Task-Parameterization. It allows to prescribe end-effector poses at defined execution times, for instance for precise pick & place scenarios. The probabilistic approach is compared with state-of-the-art learning-from-demonstration methods using the KUKA LBR iiwa robot. The reader is encouraged to watch the accompanying video available at https://youtu.be/JMI1YxtN9C0
Oncilla robot: a versatile open-source quadruped research robot with compliant pantograph legs
Jun 16, 2018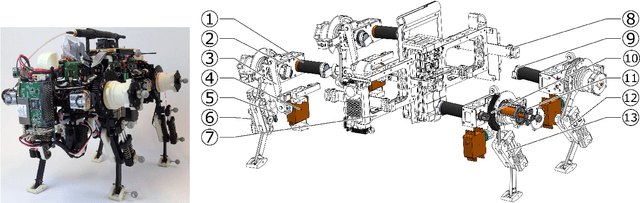
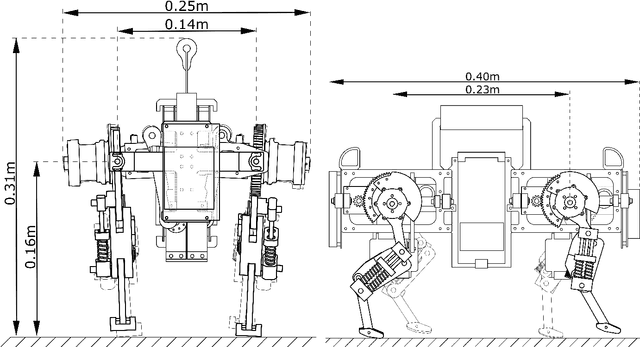
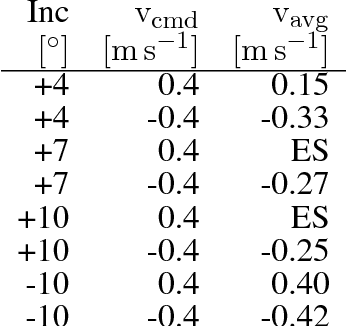
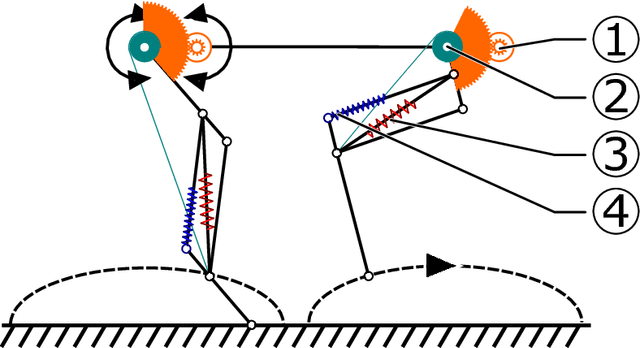
We present Oncilla robot, a novel mobile, quadruped legged locomotion machine. This large-cat sized, 5.1 robot is one of a kind of a recent, bioinspired legged robot class designed with the capability of model-free locomotion control. Animal legged locomotion in rough terrain is clearly shaped by sensor feedback systems. Results with Oncilla robot show that agile and versatile locomotion is possible without sensory signals to some extend, and tracking becomes robust when feedback control is added (Ajaoolleian 2015). By incorporating mechanical and control blueprints inspired from animals, and by observing the resulting robot locomotion characteristics, we aim to understand the contribution of individual components. Legged robots have a wide mechanical and control design parameter space, and a unique potential as research tools to investigate principles of biomechanics and legged locomotion control. But the hardware and controller design can be a steep initial hurdle for academic research. To facilitate the easy start and development of legged robots, Oncilla-robot's blueprints are available through open-source. [...]
Learning Inverse Statics Models Efficiently
Oct 17, 2017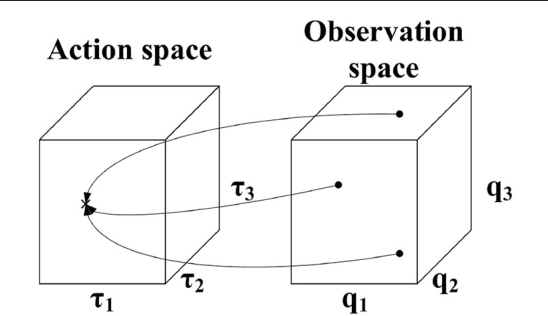
Online Goal Babbling and Direction Sampling are recently proposed methods for direct learning of inverse kinematics mappings from scratch even in high-dimensional sensorimotor spaces following the paradigm of "learning while behaving". To learn inverse statics mappings - primarily for gravity compensation - from scratch and without using any closed-loop controller, we modify and enhance the Online Goal Babbling and Direction Sampling schemes. Moreover, we exploit symmetries in the inverse statics mappings to drastically reduce the number of samples required for learning inverse statics models. Results for a 2R planar robot, a 3R simplified human arm, and a 4R humanoid robot arm clearly demonstrate that their inverse statics mappings can be learned successfully with our modified online Goal Babbling scheme. Furthermore, we show that the number of samples required for the 2R and 3R arms can be reduced by a factor of at least 8 and 16 resp. -depending on the number of discovered symmetries.