 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards a Reliable Offline Personal AI Assistant for Long Duration Spaceflight
Oct 21, 2024

As humanity prepares for new missions to the Moon and Mars, astronauts will need to operate with greater autonomy, given the communication delays that make real-time support from Earth difficult. For instance, messages between Mars and Earth can take up to 24 minutes, making quick responses impossible. This limitation poses a challenge for astronauts who must rely on in-situ tools to access the large volume of data from spacecraft sensors, rovers, and satellites, data that is often fragmented and difficult to use. To bridge this gap, systems like the Mars Exploration Telemetry-Driven Information System (METIS) are being developed. METIS is an AI assistant designed to handle routine tasks, monitor spacecraft systems, and detect anomalies, all while reducing the reliance on mission control. Current Generative Pretrained Transformer (GPT) Models, while powerful, struggle in safety-critical environments. They can generate plausible but incorrect responses, a phenomenon known as "hallucination," which could endanger astronauts. To overcome these limitations, this paper proposes enhancing systems like METIS by integrating GPTs, Retrieval-Augmented Generation (RAG), Knowledge Graphs (KGs), and Augmented Reality (AR). The idea is to allow astronauts to interact with their data more intuitively, using natural language queries and visualizing real-time information through AR. KGs will be used to easily access live telemetry and multimodal data, ensuring that astronauts have the right information at the right time. By combining AI, KGs, and AR, this new system will empower astronauts to work more autonomously, safely, and efficiently during future space missions.
Transgressing the boundaries: towards a rigorous understanding of deep learning and its (non-)robustness
Jul 05, 2023The recent advances in machine learning in various fields of applications can be largely attributed to the rise of deep learning (DL) methods and architectures. Despite being a key technology behind autonomous cars, image processing, speech recognition, etc., a notorious problem remains the lack of theoretical understanding of DL and related interpretability and (adversarial) robustness issues. Understanding the specifics of DL, as compared to, say, other forms of nonlinear regression methods or statistical learning, is interesting from a mathematical perspective, but at the same time it is of crucial importance in practice: treating neural networks as mere black boxes might be sufficient in certain cases, but many applications require waterproof performance guarantees and a deeper understanding of what could go wrong and why it could go wrong. It is probably fair to say that, despite being mathematically well founded as a method to approximate complicated functions, DL is mostly still more like modern alchemy that is firmly in the hands of engineers and computer scientists. Nevertheless, it is evident that certain specifics of DL that could explain its success in applications demands systematic mathematical approaches. In this work, we review robustness issues of DL and particularly bridge concerns and attempts from approximation theory to statistical learning theory. Further, we review Bayesian Deep Learning as a means for uncertainty quantification and rigorous explainability.
Long Short-Term Memory Neural Network for Temperature Prediction in Laser Powder Bed Additive Manufacturing
Jan 30, 2023In context of laser powder bed fusion (L-PBF), it is known that the properties of the final fabricated product highly depend on the temperature distribution and its gradient over the manufacturing plate. In this paper, we propose a novel means to predict the temperature gradient distributions during the printing process by making use of neural networks. This is realized by employing heat maps produced by an optimized printing protocol simulation and used for training a specifically tailored recurrent neural network in terms of a long short-term memory architecture. The aim of this is to avoid extreme and inhomogeneous temperature distribution that may occur across the plate in the course of the printing process. In order to train the neural network, we adopt a well-engineered simulation and unsupervised learning framework. To maintain a minimized average thermal gradient across the plate, a cost function is introduced as the core criteria, which is inspired and optimized by considering the well-known traveling salesman problem (TSP). As time evolves the unsupervised printing process governed by TSP produces a history of temperature heat maps that maintain minimized average thermal gradient. All in one, we propose an intelligent printing tool that provides control over the substantial printing process components for L-PBF, i.e.\ optimal nozzle trajectory deployment as well as online temperature prediction for controlling printing quality.
Learning Inverse Statics Models Efficiently
Oct 17, 2017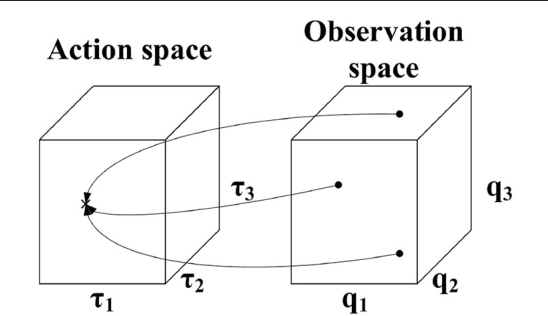
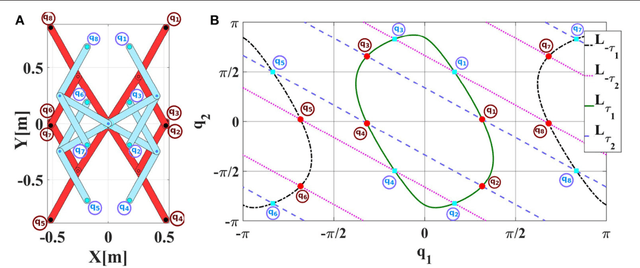
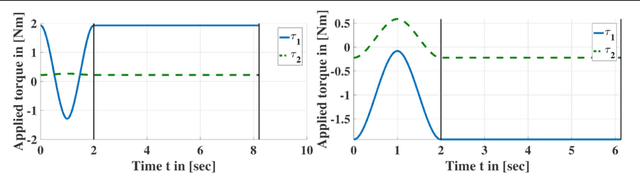
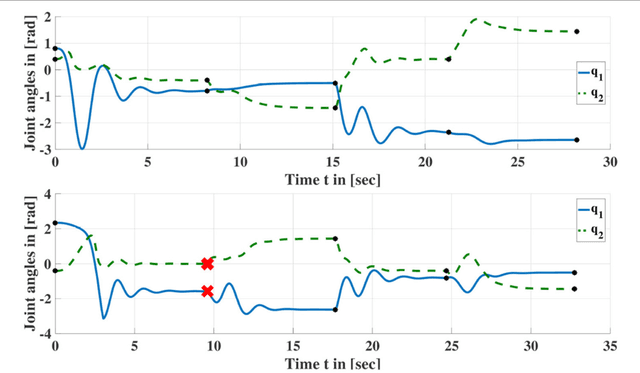
Online Goal Babbling and Direction Sampling are recently proposed methods for direct learning of inverse kinematics mappings from scratch even in high-dimensional sensorimotor spaces following the paradigm of "learning while behaving". To learn inverse statics mappings - primarily for gravity compensation - from scratch and without using any closed-loop controller, we modify and enhance the Online Goal Babbling and Direction Sampling schemes. Moreover, we exploit symmetries in the inverse statics mappings to drastically reduce the number of samples required for learning inverse statics models. Results for a 2R planar robot, a 3R simplified human arm, and a 4R humanoid robot arm clearly demonstrate that their inverse statics mappings can be learned successfully with our modified online Goal Babbling scheme. Furthermore, we show that the number of samples required for the 2R and 3R arms can be reduced by a factor of at least 8 and 16 resp. -depending on the number of discovered symmetries.