 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards a Reliable Offline Personal AI Assistant for Long Duration Spaceflight
Oct 21, 2024

As humanity prepares for new missions to the Moon and Mars, astronauts will need to operate with greater autonomy, given the communication delays that make real-time support from Earth difficult. For instance, messages between Mars and Earth can take up to 24 minutes, making quick responses impossible. This limitation poses a challenge for astronauts who must rely on in-situ tools to access the large volume of data from spacecraft sensors, rovers, and satellites, data that is often fragmented and difficult to use. To bridge this gap, systems like the Mars Exploration Telemetry-Driven Information System (METIS) are being developed. METIS is an AI assistant designed to handle routine tasks, monitor spacecraft systems, and detect anomalies, all while reducing the reliance on mission control. Current Generative Pretrained Transformer (GPT) Models, while powerful, struggle in safety-critical environments. They can generate plausible but incorrect responses, a phenomenon known as "hallucination," which could endanger astronauts. To overcome these limitations, this paper proposes enhancing systems like METIS by integrating GPTs, Retrieval-Augmented Generation (RAG), Knowledge Graphs (KGs), and Augmented Reality (AR). The idea is to allow astronauts to interact with their data more intuitively, using natural language queries and visualizing real-time information through AR. KGs will be used to easily access live telemetry and multimodal data, ensuring that astronauts have the right information at the right time. By combining AI, KGs, and AR, this new system will empower astronauts to work more autonomously, safely, and efficiently during future space missions.
AI Assistants for Spaceflight Procedures: Combining Generative Pre-Trained Transformer and Retrieval-Augmented Generation on Knowledge Graphs With Augmented Reality Cues
Sep 21, 2024
This paper describes the capabilities and potential of the intelligent personal assistant (IPA) CORE (Checklist Organizer for Research and Exploration), designed to support astronauts during procedures onboard the International Space Station (ISS), the Lunar Gateway station, and beyond. We reflect on the importance of a reliable and flexible assistant capable of offline operation and highlight the usefulness of audiovisual interaction using augmented reality elements to intuitively display checklist information. We argue that current approaches to the design of IPAs in space operations fall short of meeting these criteria. Therefore, we propose CORE as an assistant that combines Knowledge Graphs (KGs), Retrieval-Augmented Generation (RAG) for a Generative Pre-Trained Transformer (GPT), and Augmented Reality (AR) elements to ensure an intuitive understanding of procedure steps, reliability, offline availability, and flexibility in terms of response style and procedure updates.
Telerobotic Mars Mission for Lava Tube Exploration and Examination of Life
Jan 31, 2023The general profile and overarching goal of this proposed mission is to pioneer potentially highly beneficial (even vital) and cost-effective techniques for the future human colonization of Mars. Adopting radically new and disruptive solutions untested in the Martian context, our approach is one of high risk and high reward. The real possibility of such a solution failing has prompted us to base our mission architecture around a rover carrying a set of 6 distinct experimental payloads, each capable of operating independently on the others, thus substantially increasing the chances of the mission yielding some valuable findings. At the same time, we sought to exploit available synergies by assembling a combination of payloads that would together form a coherent experimental ecosystem, with each payload providing potential value to the others. Apart from providing such a testbed for evaluation of novel technological solutions, another aim of our proposed mission is to help generate scientific know-how enhancing our understanding of the Red Planet. To this end, our mission takes aim at the Nili-Fossae region, rich in natural resources (and carbonates in particular), past water repositories and signs of volcanic activity. With our proposed experimental payloads, we intend to explore existing lava-tubes, search for signs of past life and assess their potentially valuable geological features for future base building. We will evaluate biomatter in the form of plants and fungi as possible food and base-building materials respectively. Finally, we seek to explore a variety of novel power generation techniques using the Martian atmosphere and gravity. As detailed throughout the remainder of this chapter, this assemblage of experimental payloads, then, constitutes the backbone of our proposed telerobotic mission to Mars.
I Probe, Therefore I Am: Designing a Virtual Journalist with Human Emotions
May 18, 2017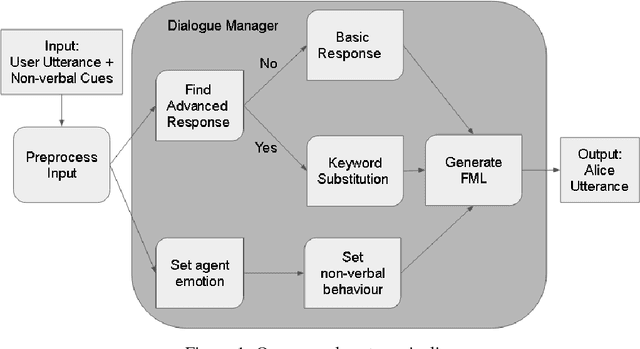
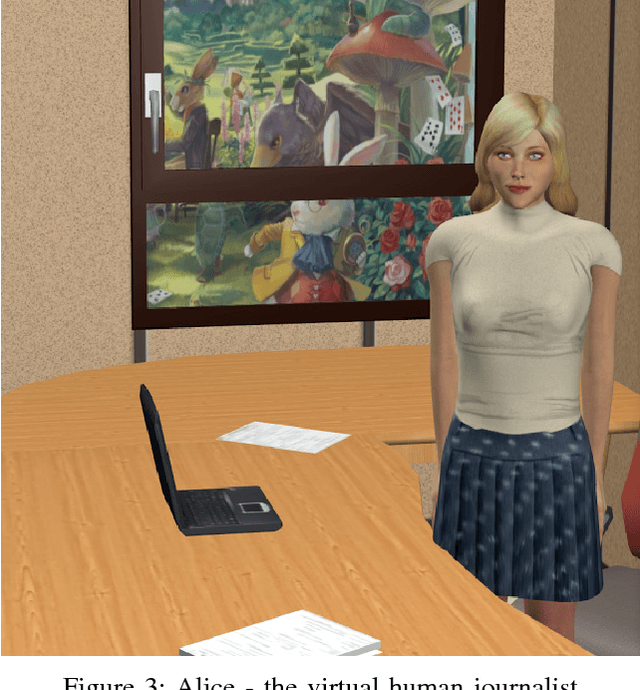
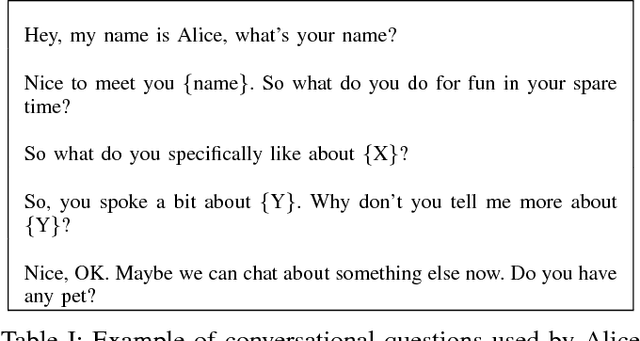
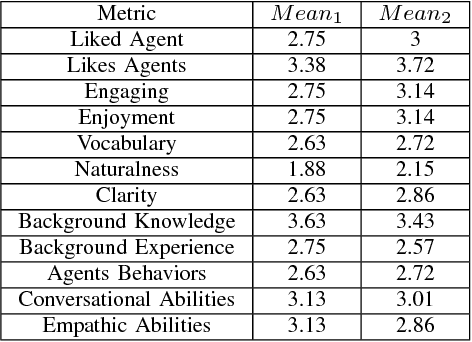
By utilizing different communication channels, such as verbal language, gestures or facial expressions, virtually embodied interactive humans hold a unique potential to bridge the gap between human-computer interaction and actual interhuman communication. The use of virtual humans is consequently becoming increasingly popular in a wide range of areas where such a natural communication might be beneficial, including entertainment, education, mental health research and beyond. Behind this development lies a series of technological advances in a multitude of disciplines, most notably natural language processing, computer vision, and speech synthesis. In this paper we discuss a Virtual Human Journalist, a project employing a number of novel solutions from these disciplines with the goal to demonstrate their viability by producing a humanoid conversational agent capable of naturally eliciting and reacting to information from a human user. A set of qualitative and quantitative evaluation sessions demonstrated the technical feasibility of the system whilst uncovering a number of deficits in its capacity to engage users in a way that would be perceived as natural and emotionally engaging. We argue that naturalness should not always be seen as a desirable goal and suggest that deliberately suppressing the naturalness of virtual human interactions, such as by altering its personality cues, might in some cases yield more desirable results.