 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards a Reliable Offline Personal AI Assistant for Long Duration Spaceflight
Oct 21, 2024

As humanity prepares for new missions to the Moon and Mars, astronauts will need to operate with greater autonomy, given the communication delays that make real-time support from Earth difficult. For instance, messages between Mars and Earth can take up to 24 minutes, making quick responses impossible. This limitation poses a challenge for astronauts who must rely on in-situ tools to access the large volume of data from spacecraft sensors, rovers, and satellites, data that is often fragmented and difficult to use. To bridge this gap, systems like the Mars Exploration Telemetry-Driven Information System (METIS) are being developed. METIS is an AI assistant designed to handle routine tasks, monitor spacecraft systems, and detect anomalies, all while reducing the reliance on mission control. Current Generative Pretrained Transformer (GPT) Models, while powerful, struggle in safety-critical environments. They can generate plausible but incorrect responses, a phenomenon known as "hallucination," which could endanger astronauts. To overcome these limitations, this paper proposes enhancing systems like METIS by integrating GPTs, Retrieval-Augmented Generation (RAG), Knowledge Graphs (KGs), and Augmented Reality (AR). The idea is to allow astronauts to interact with their data more intuitively, using natural language queries and visualizing real-time information through AR. KGs will be used to easily access live telemetry and multimodal data, ensuring that astronauts have the right information at the right time. By combining AI, KGs, and AR, this new system will empower astronauts to work more autonomously, safely, and efficiently during future space missions.
AI Assistants for Spaceflight Procedures: Combining Generative Pre-Trained Transformer and Retrieval-Augmented Generation on Knowledge Graphs With Augmented Reality Cues
Sep 21, 2024
This paper describes the capabilities and potential of the intelligent personal assistant (IPA) CORE (Checklist Organizer for Research and Exploration), designed to support astronauts during procedures onboard the International Space Station (ISS), the Lunar Gateway station, and beyond. We reflect on the importance of a reliable and flexible assistant capable of offline operation and highlight the usefulness of audiovisual interaction using augmented reality elements to intuitively display checklist information. We argue that current approaches to the design of IPAs in space operations fall short of meeting these criteria. Therefore, we propose CORE as an assistant that combines Knowledge Graphs (KGs), Retrieval-Augmented Generation (RAG) for a Generative Pre-Trained Transformer (GPT), and Augmented Reality (AR) elements to ensure an intuitive understanding of procedure steps, reliability, offline availability, and flexibility in terms of response style and procedure updates.
Style Vectors for Steering Generative Large Language Model
Feb 02, 2024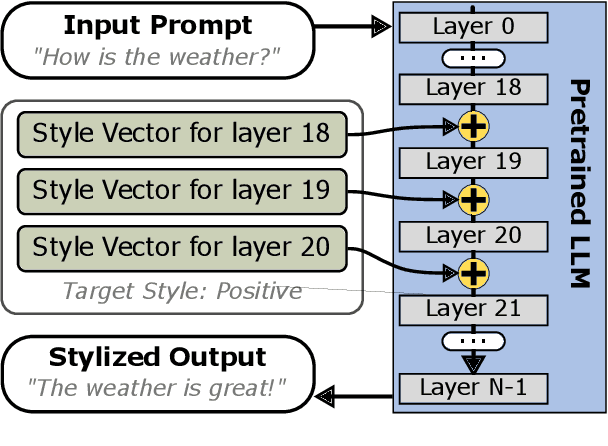
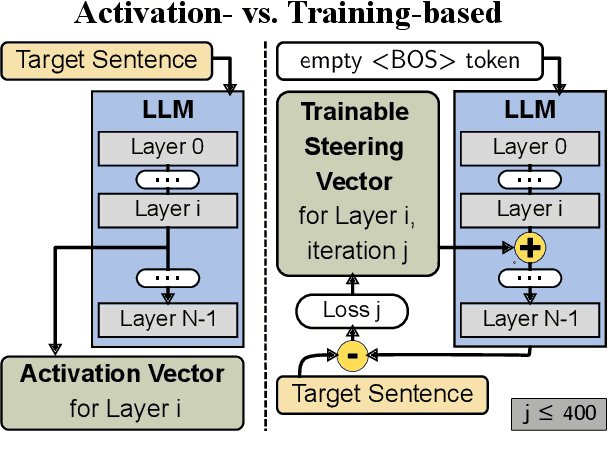
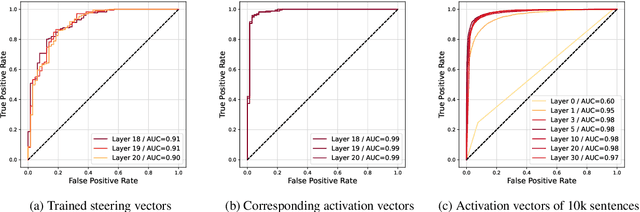
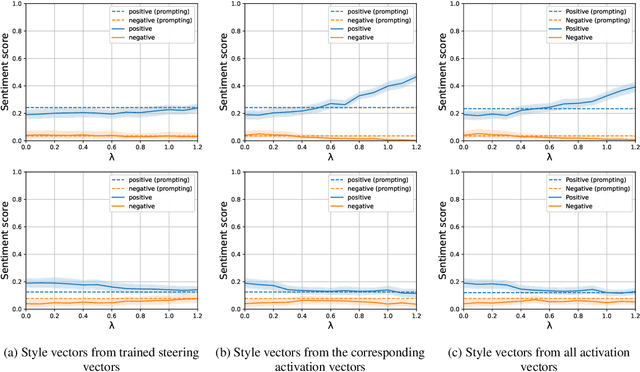
This research explores strategies for steering the output of large language models (LLMs) towards specific styles, such as sentiment, emotion, or writing style, by adding style vectors to the activations of hidden layers during text generation. We show that style vectors can be simply computed from recorded layer activations for input texts in a specific style in contrast to more complex training-based approaches. Through a series of experiments, we demonstrate the effectiveness of activation engineering using such style vectors to influence the style of generated text in a nuanced and parameterisable way, distinguishing it from prompt engineering. The presented research constitutes a significant step towards developing more adaptive and effective AI-empowered interactive systems.
Telerobotic Mars Mission for Lava Tube Exploration and Examination of Life
Jan 31, 2023The general profile and overarching goal of this proposed mission is to pioneer potentially highly beneficial (even vital) and cost-effective techniques for the future human colonization of Mars. Adopting radically new and disruptive solutions untested in the Martian context, our approach is one of high risk and high reward. The real possibility of such a solution failing has prompted us to base our mission architecture around a rover carrying a set of 6 distinct experimental payloads, each capable of operating independently on the others, thus substantially increasing the chances of the mission yielding some valuable findings. At the same time, we sought to exploit available synergies by assembling a combination of payloads that would together form a coherent experimental ecosystem, with each payload providing potential value to the others. Apart from providing such a testbed for evaluation of novel technological solutions, another aim of our proposed mission is to help generate scientific know-how enhancing our understanding of the Red Planet. To this end, our mission takes aim at the Nili-Fossae region, rich in natural resources (and carbonates in particular), past water repositories and signs of volcanic activity. With our proposed experimental payloads, we intend to explore existing lava-tubes, search for signs of past life and assess their potentially valuable geological features for future base building. We will evaluate biomatter in the form of plants and fungi as possible food and base-building materials respectively. Finally, we seek to explore a variety of novel power generation techniques using the Martian atmosphere and gravity. As detailed throughout the remainder of this chapter, this assemblage of experimental payloads, then, constitutes the backbone of our proposed telerobotic mission to Mars.
Key Information Extraction From Documents: Evaluation And Generator
Jun 09, 2021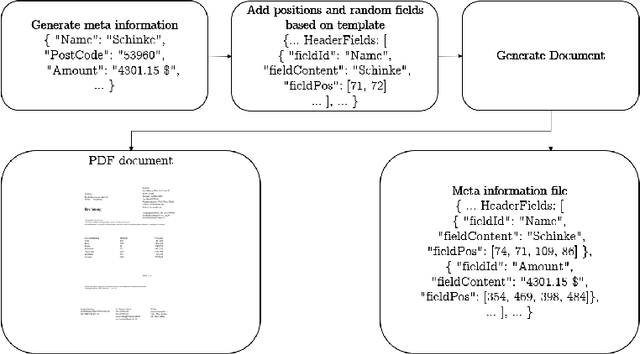
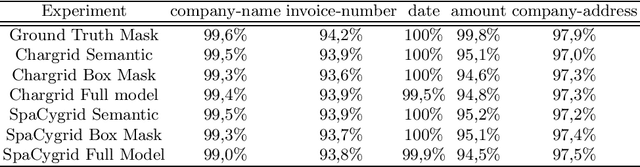
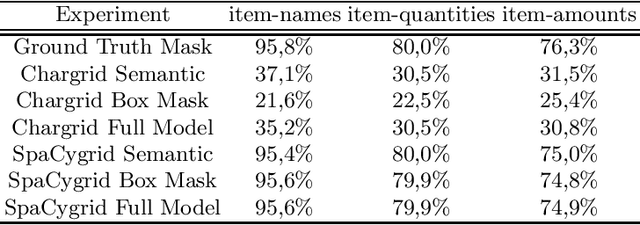
Extracting information from documents usually relies on natural language processing methods working on one-dimensional sequences of text. In some cases, for example, for the extraction of key information from semi-structured documents, such as invoice-documents, spatial and formatting information of text are crucial to understand the contextual meaning. Convolutional neural networks are already common in computer vision models to process and extract relationships in multidimensional data. Therefore, natural language processing models have already been combined with computer vision models in the past, to benefit from e.g. positional information and to improve performance of these key information extraction models. Existing models were either trained on unpublished data sets or on an annotated collection of receipts, which did not focus on PDF-like documents. Hence, in this research project a template-based document generator was created to compare state-of-the-art models for information extraction. An existing information extraction model "Chargrid" (Katti et al., 2019) was reconstructed and the impact of a bounding box regression decoder, as well as the impact of an NLP pre-processing step was evaluated for information extraction from documents. The results have shown that NLP based pre-processing is beneficial for model performance. However, the use of a bounding box regression decoder increases the model performance only for fields that do not follow a rectangular shape.