 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIndustry Best Practices in Robotics Software Engineering
Dec 09, 2022Robotics software is pushing the limits of software engineering practice. The 3rd International Workshop on Robotics Software Engineering held a panel on "the best practices for robotic software engineering". This article shares the key takeaways that emerged from the discussion among the panelists and the workshop, ranging from architecting practices at the NASA/Caltech Jet Propulsion Laboratory, model-driven development at Bosch, development and testing of autonomous driving systems at Waymo, and testing of robotics software at XITASO. Researchers and practitioners can build on the contents of this paper to gain a fresh perspective on their activities and focus on the most pressing practices and challenges in developing robotics software today.
Oncilla robot: a versatile open-source quadruped research robot with compliant pantograph legs
Jun 16, 2018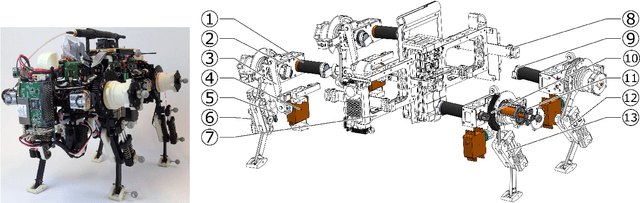
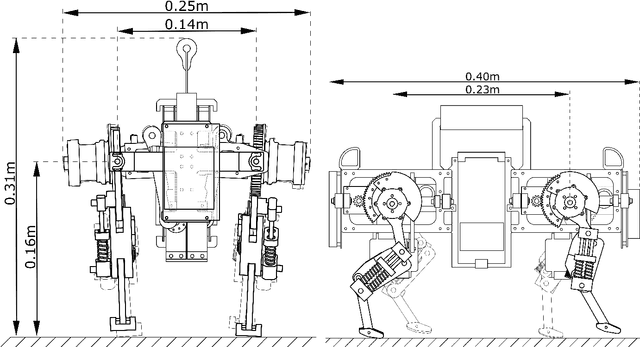
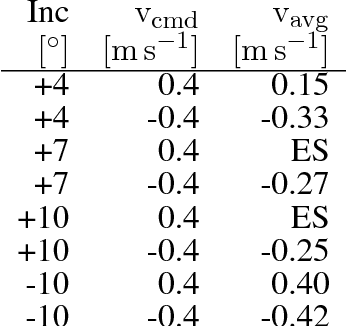
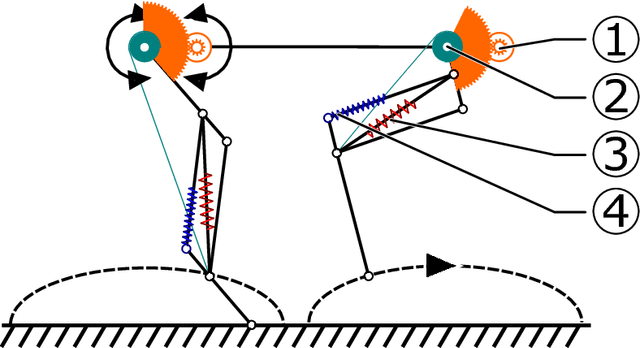
We present Oncilla robot, a novel mobile, quadruped legged locomotion machine. This large-cat sized, 5.1 robot is one of a kind of a recent, bioinspired legged robot class designed with the capability of model-free locomotion control. Animal legged locomotion in rough terrain is clearly shaped by sensor feedback systems. Results with Oncilla robot show that agile and versatile locomotion is possible without sensory signals to some extend, and tracking becomes robust when feedback control is added (Ajaoolleian 2015). By incorporating mechanical and control blueprints inspired from animals, and by observing the resulting robot locomotion characteristics, we aim to understand the contribution of individual components. Legged robots have a wide mechanical and control design parameter space, and a unique potential as research tools to investigate principles of biomechanics and legged locomotion control. But the hardware and controller design can be a steep initial hurdle for academic research. To facilitate the easy start and development of legged robots, Oncilla-robot's blueprints are available through open-source. [...]
A Domain-Specific Language for Rich Motor Skill Architectures
Feb 26, 2013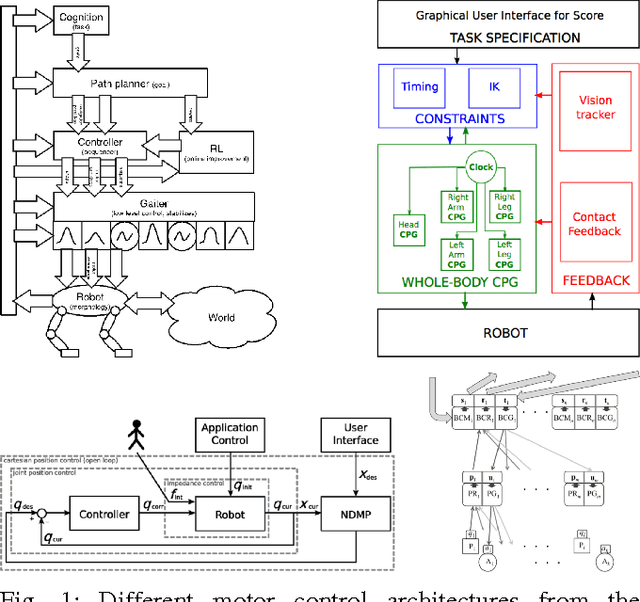
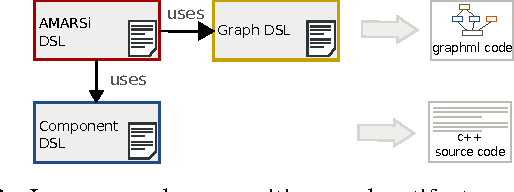
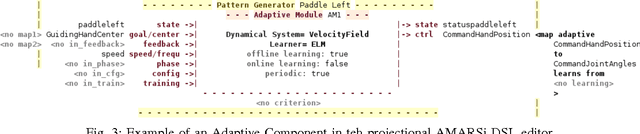
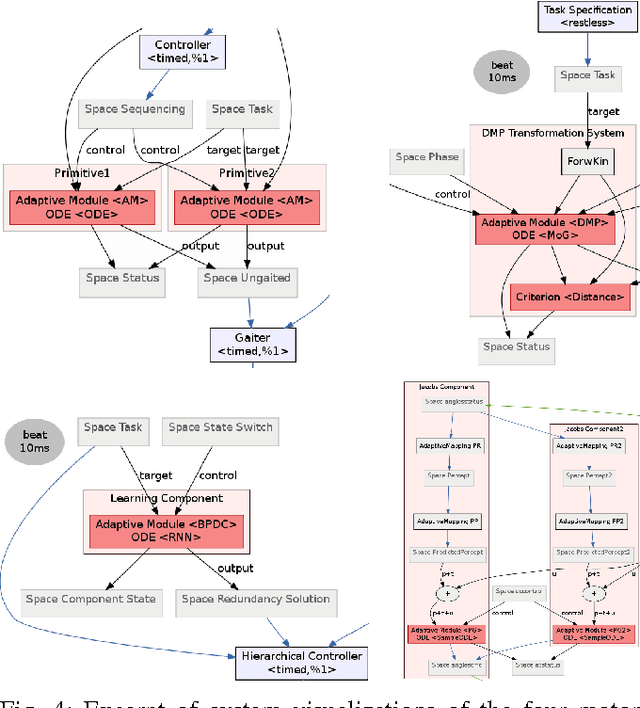
Model-driven software development is a promising way to cope with the complexity of system integration in advanced robotics, as it already demonstrated its benefits in domains with comparably challenging system integration requirements. This paper reports on work in progress in this area which aims to improve the research and experimentation process in a collaborative research project developing motor skill architectures for compliant robots. Our goal is to establish a model-driven development process throughout the project around a domain-specific language (DSL) facilitating the compact description of adaptive modular architectures for rich motor skills. Incorporating further languages for other aspects (e.g. mapping to a technical component architecture) the approach allows not only the formal description of motor skill architectures but also automated code-generation for experimentation on technical robot platforms. This paper reports on a first case study exemplifying how the developed AMARSi DSL helps to conceptualize different architectural approaches and to identify their similarities and differences.