 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSHaRe-RL: Structured, Interactive Reinforcement Learning for Contact-Rich Industrial Assembly Tasks
Sep 17, 2025High-mix low-volume (HMLV) industrial assembly, common in small and medium-sized enterprises (SMEs), requires the same precision, safety, and reliability as high-volume automation while remaining flexible to product variation and environmental uncertainty. Current robotic systems struggle to meet these demands. Manual programming is brittle and costly to adapt, while learning-based methods suffer from poor sample efficiency and unsafe exploration in contact-rich tasks. To address this, we present SHaRe-RL, a reinforcement learning framework that leverages multiple sources of prior knowledge. By (i) structuring skills into manipulation primitives, (ii) incorporating human demonstrations and online corrections, and (iii) bounding interaction forces with per-axis compliance, SHaRe-RL enables efficient and safe online learning for long-horizon, contact-rich industrial assembly tasks. Experiments on the insertion of industrial Harting connector modules with 0.2-0.4 mm clearance demonstrate that SHaRe-RL achieves reliable performance within practical time budgets. Our results show that process expertise, without requiring robotics or RL knowledge, can meaningfully contribute to learning, enabling safer, more robust, and more economically viable deployment of RL for industrial assembly.
Results of the Survey: Failures in Robotics and Intelligent Systems
Aug 24, 2017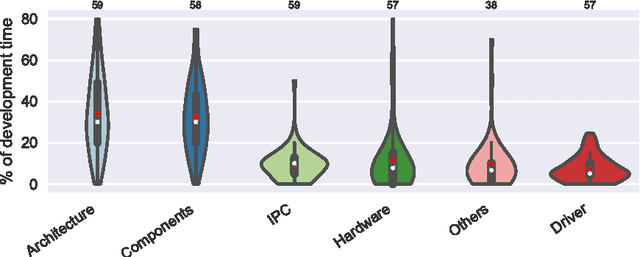
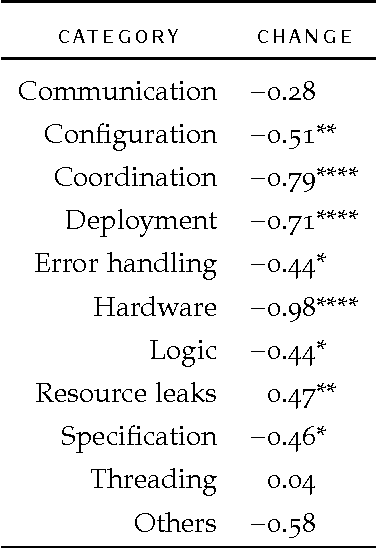
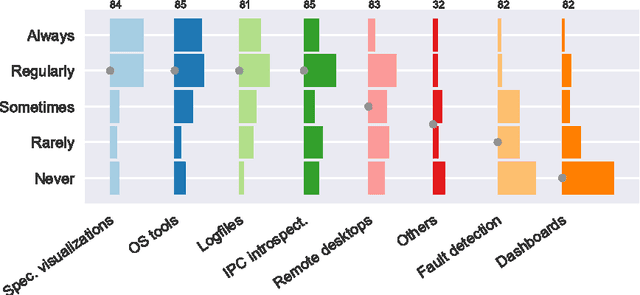

In January 2015 we distributed an online survey about failures in robotics and intelligent systems across robotics researchers. The aim of this survey was to find out which types of failures currently exist, what their origins are, and how systems are monitored and debugged - with a special focus on performance bugs. This report summarizes the findings of the survey.
Proceedings of the Sixth International Workshop on Domain-Specific Languages and Models for Robotic Systems (DSLRob 2015)
Jan 20, 2016The Sixth International Workshop on Domain-Specific Languages and Models for Robotic Systems (DSLRob'15) was held September 28, 2015 in Hamburg (Germany), as part of the IROS 2015 conference. The main topics of the workshop were Domain-Specific Languages (DSLs) and Model-driven Software Development (MDSD) for robotics. A domain-specific language is a programming language dedicated to a particular problem domain that offers specific notations and abstractions that increase programmer productivity within that domain. Model-driven software development offers a high-level way for domain users to specify the functionality of their system at the right level of abstraction. DSLs and models have historically been used for programming complex systems. However recently they have garnered interest as a separate field of study. Robotic systems blend hardware and software in a holistic way that intrinsically raises many crosscutting concerns (concurrency, uncertainty, time constraints, ...), for which reason, traditional general-purpose languages often lead to a poor fit between the language features and the implementation requirements. DSLs and models offer a powerful, systematic way to overcome this problem, enabling the programmer to quickly and precisely implement novel software solutions to complex problems within the robotics domain.
A Domain-Specific Language for Rich Motor Skill Architectures
Feb 26, 2013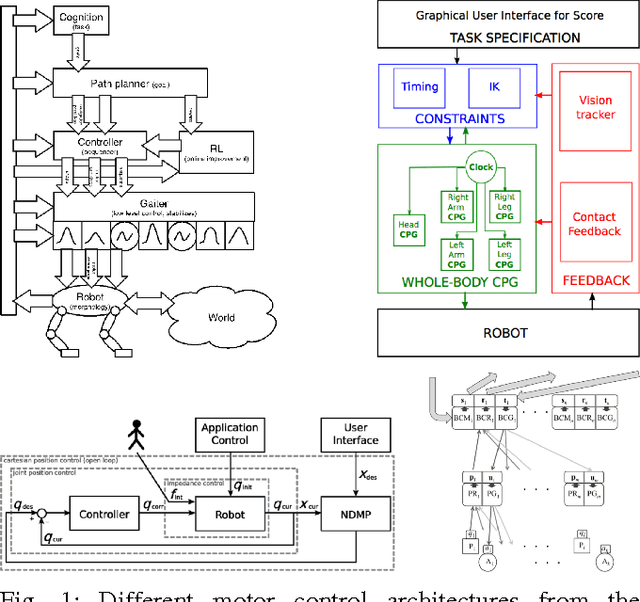
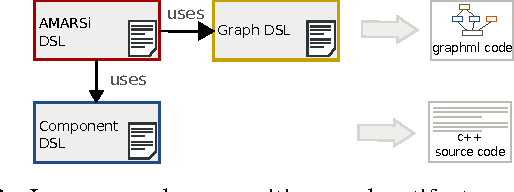
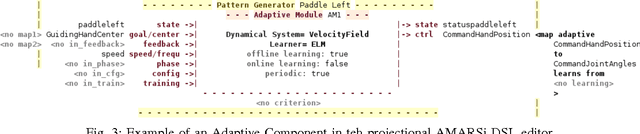
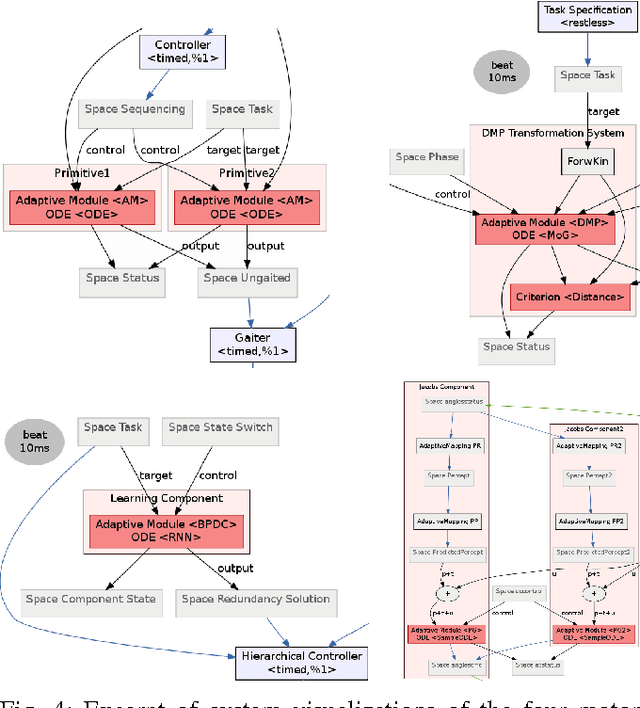
Model-driven software development is a promising way to cope with the complexity of system integration in advanced robotics, as it already demonstrated its benefits in domains with comparably challenging system integration requirements. This paper reports on work in progress in this area which aims to improve the research and experimentation process in a collaborative research project developing motor skill architectures for compliant robots. Our goal is to establish a model-driven development process throughout the project around a domain-specific language (DSL) facilitating the compact description of adaptive modular architectures for rich motor skills. Incorporating further languages for other aspects (e.g. mapping to a technical component architecture) the approach allows not only the formal description of motor skill architectures but also automated code-generation for experimentation on technical robot platforms. This paper reports on a first case study exemplifying how the developed AMARSi DSL helps to conceptualize different architectural approaches and to identify their similarities and differences.