 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnergy-Aware Planning-Scheduling for Autonomous Aerial Robots
Jul 22, 2022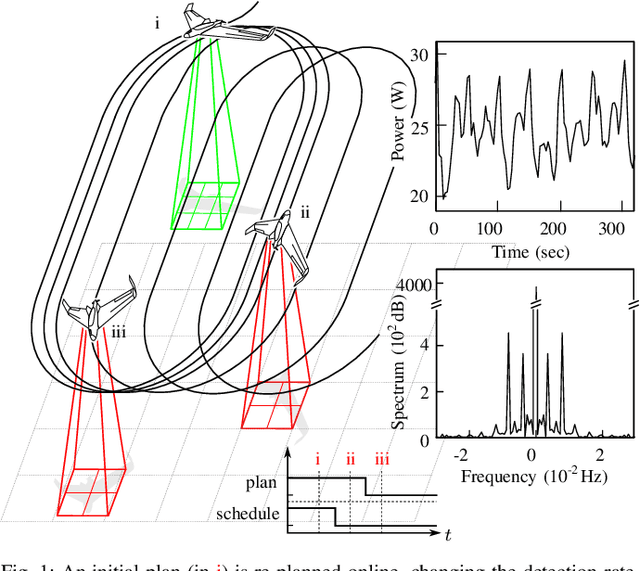
In this paper, we present an online planning-scheduling approach for battery-powered autonomous aerial robots. The approach consists of simultaneously planning a coverage path and scheduling onboard computational tasks. We further derive a novel variable coverage motion robust to airborne constraints and an empirically motivated energy model. The model includes the energy contribution of the schedule based on an automatic computational energy modeling tool. Our experiments show how an initial flight plan is adjusted online as a function of the available battery, accounting for uncertainty. Our approach remedies possible in-flight failure in case of unexpected battery drops, e.g., due to adverse atmospheric conditions, and increases the overall fault tolerance.
Towards a DSL for Perception-Based Safety Systems
Mar 07, 2016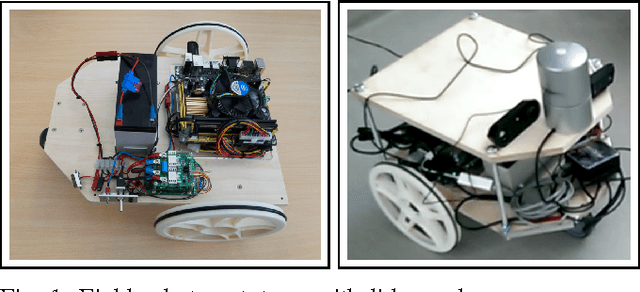
This paper is an extension to an early presented programming language, called a domain specific language. This paper extends the proposed concept with new sensors and behaviours to address real-life situations. The functionality was tested in lab experiments, and an extension to the earlier concepts is proposed.
Proceedings of the Sixth International Workshop on Domain-Specific Languages and Models for Robotic Systems (DSLRob 2015)
Jan 20, 2016The Sixth International Workshop on Domain-Specific Languages and Models for Robotic Systems (DSLRob'15) was held September 28, 2015 in Hamburg (Germany), as part of the IROS 2015 conference. The main topics of the workshop were Domain-Specific Languages (DSLs) and Model-driven Software Development (MDSD) for robotics. A domain-specific language is a programming language dedicated to a particular problem domain that offers specific notations and abstractions that increase programmer productivity within that domain. Model-driven software development offers a high-level way for domain users to specify the functionality of their system at the right level of abstraction. DSLs and models have historically been used for programming complex systems. However recently they have garnered interest as a separate field of study. Robotic systems blend hardware and software in a holistic way that intrinsically raises many crosscutting concerns (concurrency, uncertainty, time constraints, ...), for which reason, traditional general-purpose languages often lead to a poor fit between the language features and the implementation requirements. DSLs and models offer a powerful, systematic way to overcome this problem, enabling the programmer to quickly and precisely implement novel software solutions to complex problems within the robotics domain.
Towards Declarative Safety Rules for Perception Specification Architectures
Jan 12, 2016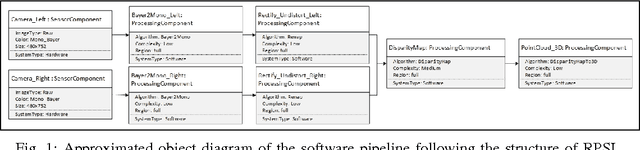
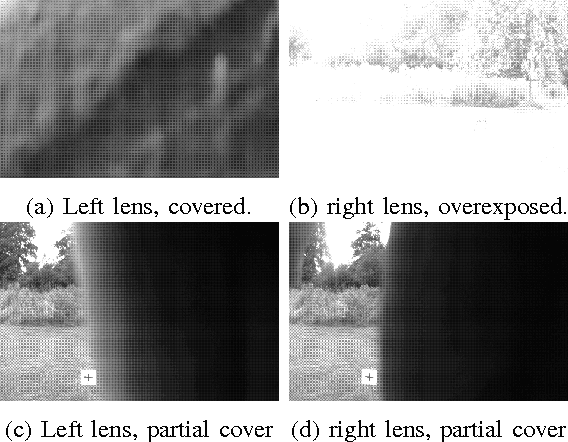
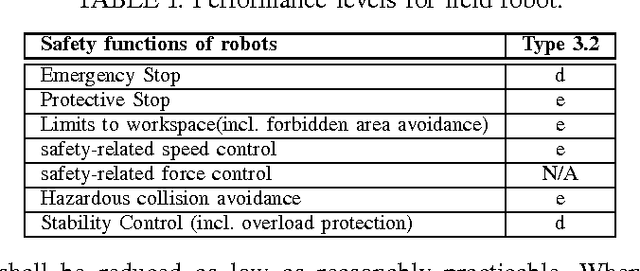
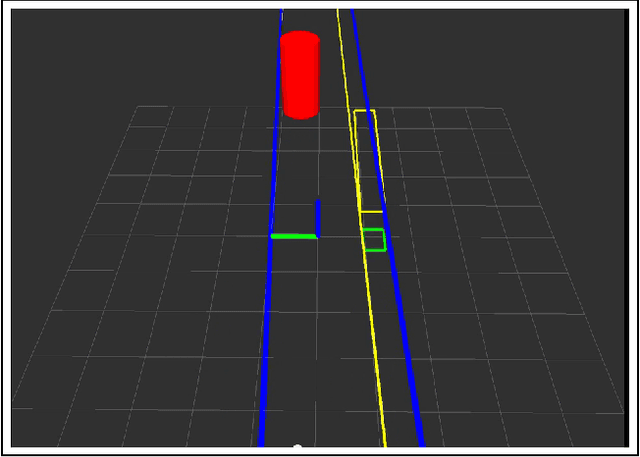
Agriculture has a high number of fatalities compared to other blue collar fields, additionally population decreasing in rural areas is resulting in decreased work force. These issues have resulted in increased focus on improving efficiency of and introducing autonomy in agriculture. Field robots are an increasingly promising branch of robotics targeted at full automation in agriculture. The safety aspect however is rely addressed in connection with safety standards, which limits the real-world applicability. In this paper we present an analysis of a vision pipeline in connection with functional-safety standards, in order to propose solutions for how to ascertain that the system operates as required. Based on the analysis we demonstrate a simple mechanism for verifying that a vision pipeline is functioning correctly, thus improving the safety in the overall system.
Towards Interactive, Incremental Programming of ROS Nodes
Dec 15, 2014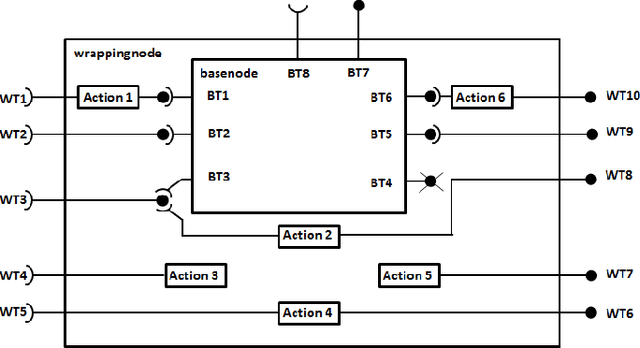
Writing software for controlling robots is a complex task, usually demanding command of many programming languages and requiring significant experimentation. We believe that a bottom-up development process that complements traditional component- and MDSD-based approaches can facilitate experimentation. We propose the use of an internal DSL providing both a tool to interactively create ROS nodes and a behaviour-replacement mechanism to interactively reshape existing ROS nodes by wrapping the external interfaces (the publish/subscribe topics), dynamically controlled using the Python command line interface.
Proceedings of the Fifth International Workshop on Domain-Specific Languages and Models for Robotic Systems
Nov 26, 2014The Fifth International Workshop on Domain-Specific Languages and Models for Robotic Systems (DSLRob'14) was held in conjunction with the 2014 International Conference on Simulation, Modeling, and Programming for Autonomous Robots (SIMPAR 2014), October 2014 in Bergamo, Italy. The main topics of the workshop were Domain-Specific Languages (DSLs) and Model-driven Software Development (MDSD) for robotics. A domain-specific language is a programming language dedicated to a particular problem domain that offers specific notations and abstractions that increase programmer productivity within that domain. Model-driven software development offers a high-level way for domain users to specify the functionality of their system at the right level of abstraction. DSLs and models have historically been used for programming complex systems. However recently they have garnered interest as a separate field of study. Robotic systems blend hardware and software in a holistic way that intrinsically raises many crosscutting concerns (concurrency, uncertainty, time constraints, ...), for which reason, traditional general-purpose languages often lead to a poor fit between the language features and the implementation requirements. DSLs and models offer a powerful, systematic way to overcome this problem, enabling the programmer to quickly and precisely implement novel software solutions to complex problems within the robotics domain.
Towards Automatic Migration of ROS Components from Software to Hardware
Jul 28, 2014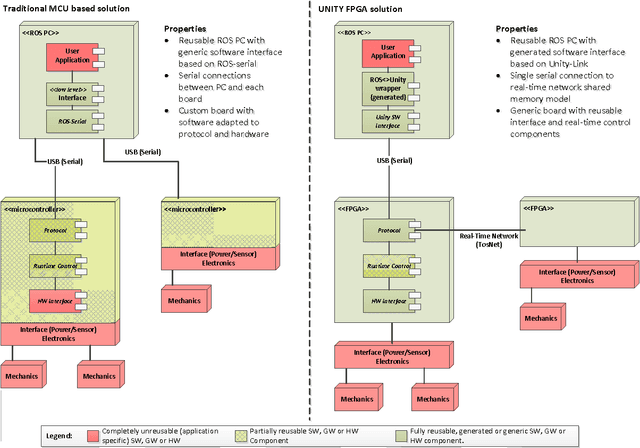
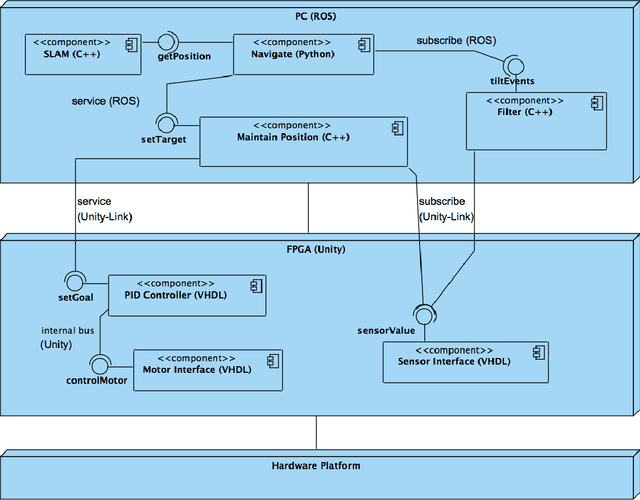
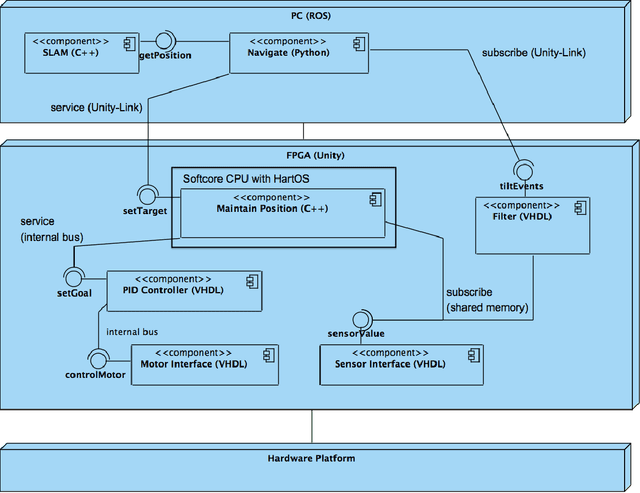
The use of the ROS middleware is a growing trend in robotics in general, ROS and hard real-time embedded systems have however not been easily uniteable while retaining the same overall communication and processing methodology at all levels. In this paper we present an approach aimed at tackling the schism between high-level, flexible software and low-level, real-time software. The key idea of our approach is to enable software components written for a high-level publish-subscribe software architecture to be automatically migrated to a dedicated hardware architecture implemented using programmable logic. Our approach is based on the Unity framework, a unified software/hardware framework based on FPGAs for quickly interfacing high-level software to low-level robotics hardware.
Proceedings of the Fourth International Workshop on Domain-Specific Languages and Models for Robotic Systems
Dec 20, 2013The Fourth International Workshop on Domain-Specific Languages and Models for Robotic Systems (DSLRob'13) was held in conjunction with the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2013), November 2013 in Tokyo, Japan. The main topics of the workshop were Domain-Specific Languages (DSLs) and Model-driven Software Development (MDSD) for robotics. A domain-specific language is a programming language dedicated to a particular problem domain that offers specific notations and abstractions that increase programmer productivity within that domain. Model-driven software development offers a high-level way for domain users to specify the functionality of their system at the right level of abstraction. DSLs and models have historically been used for programming complex systems. However recently they have garnered interest as a separate field of study. Robotic systems blend hardware and software in a holistic way that intrinsically raises many crosscutting concerns (concurrency, uncertainty, time constraints, ...), for which reason, traditional general-purpose languages often lead to a poor fit between the language features and the implementation requirements. DSLs and models offer a powerful, systematic way to overcome this problem, enabling the programmer to quickly and precisely implement novel software solutions to complex problems within the robotics domain.
Towards Python-based Domain-specific Languages for Self-reconfigurable Modular Robotics Research
Feb 22, 2013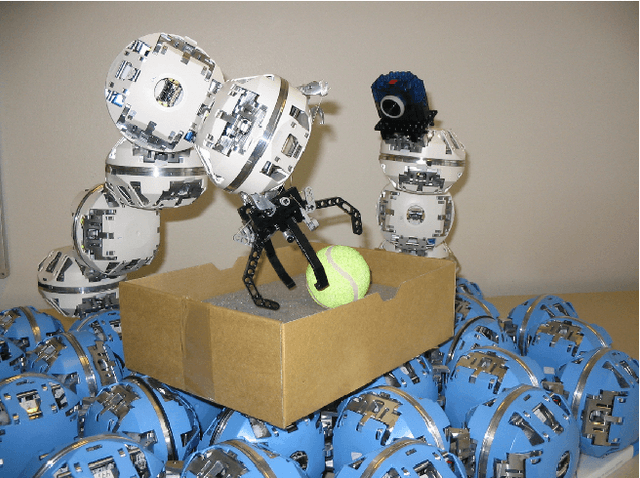
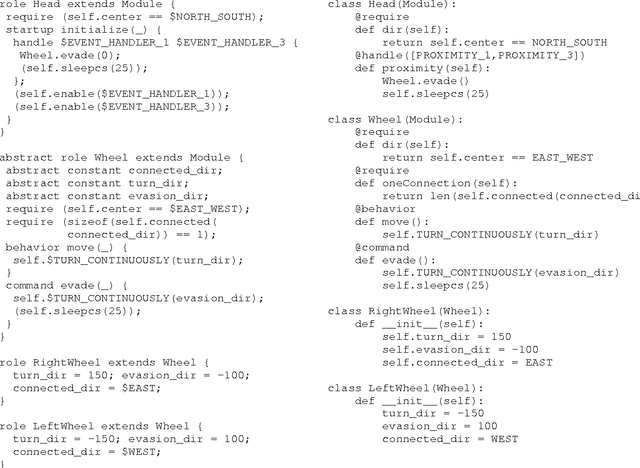

This paper explores the role of operating system and high-level languages in the development of software and domain-specific languages (DSLs) for self-reconfigurable robotics. We review some of the current trends in self-reconfigurable robotics and describe the development of a software system for ATRON II which utilizes Linux and Python to significantly improve software abstraction and portability while providing some basic features which could prove useful when using Python, either stand-alone or via a DSL, on a self-reconfigurable robot system. These features include transparent socket communication, module identification, easy software transfer and reliable module-to-module communication. The end result is a software platform for modular robots that where appropriate builds on existing work in operating systems, virtual machines, middleware and high-level languages.
Proceedings of the Second International Workshop on Domain-Specific Languages and Models for Robotic Systems
Dec 10, 2012Proceedings of the Second International Workshop on Domain-Specific Languages and Models for Robotic Systems (DSLRob'11), held in conjunction with the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2011), September 2011 in San Francisco, USA. The main topics of the workshop were Domain-Specific Languages (DSLs) and Model-driven Software Development (MDSD) for robotics. A domain-specific language (DSL) is a programming language dedicated to a particular problem domain that offers specific notations and abstractions that increase programmer productivity within that domain. Models offer a high-level way for domain users to specify the functionality of their system at the right level of abstraction. DSLs and models have historically been used for programming complex systems. However recently they have garnered interest as a separate field of study. Robotic systems blend hardware and software in a holistic way that intrinsically raises many crosscutting concerns (concurrency, uncertainty, time constraints, ...), for which reason, traditional general-purpose languages often lead to a poor fit between the language features and the implementation requirements. DSLs and models offer a powerful, systematic way to overcome this problem, enabling the programmer to quickly and precisely implement novel software solutions to complex problems