 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Python-based Domain-specific Languages for Self-reconfigurable Modular Robotics Research
Feb 22, 2013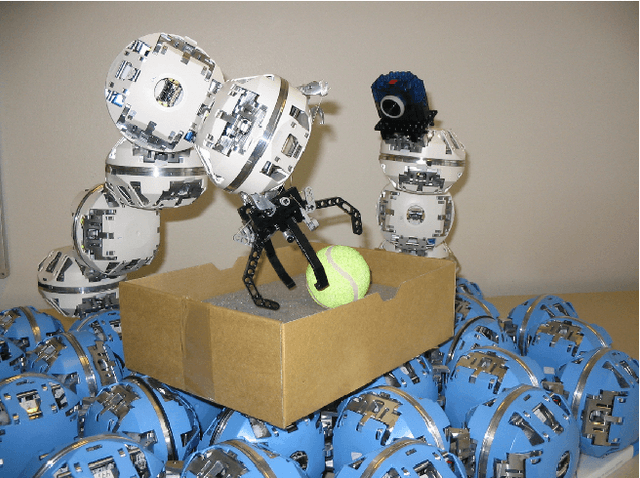
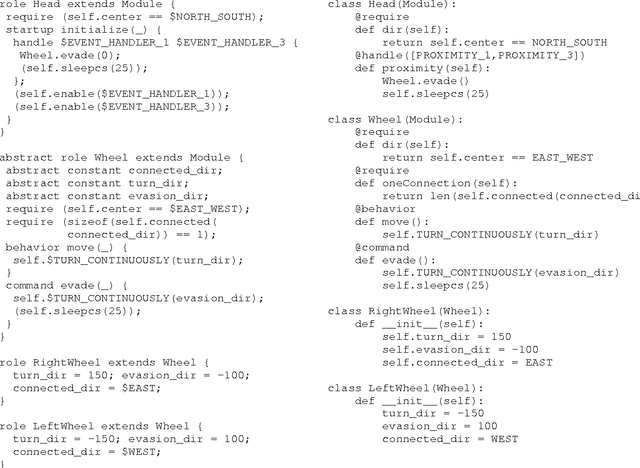

This paper explores the role of operating system and high-level languages in the development of software and domain-specific languages (DSLs) for self-reconfigurable robotics. We review some of the current trends in self-reconfigurable robotics and describe the development of a software system for ATRON II which utilizes Linux and Python to significantly improve software abstraction and portability while providing some basic features which could prove useful when using Python, either stand-alone or via a DSL, on a self-reconfigurable robot system. These features include transparent socket communication, module identification, easy software transfer and reliable module-to-module communication. The end result is a software platform for modular robots that where appropriate builds on existing work in operating systems, virtual machines, middleware and high-level languages.