 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Inverse Sensor Mapping in Agriculture
May 22, 2018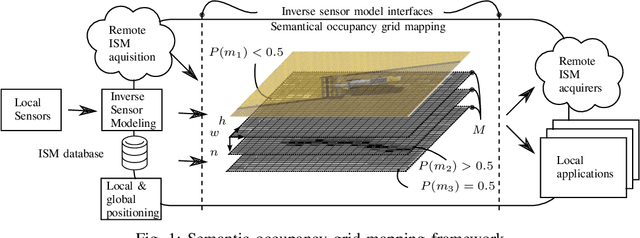
In recent years, the drive of the Industry 4.0 initiative has enriched industrial and scientific approaches to build self-driving cars or smart factories. Agricultural applications benefit from both advances, as they are in reality mobile driving factories which process the environment. Therefore, acurate perception of the surrounding is a crucial task as it involves the goods to be processed, in contrast to standard indoor production lines. Environmental processing requires accurate and robust quantification in order to correctly adjust processing parameters and detect hazardous risks during the processing. While today approaches still implement functional elements based on a single particular set of sensors, it may become apparent that a unified representation of the environment compiled from all available information sources would be more versatile, sufficient, and cost effective. The key to this approach is the means of developing a common information language from the data provided. In this paper, we introduce and discuss techniques to build so called inverse sensor models that create a common information language among different, but typically agricultural, information providers. These can be current live sensor data, farm management systems, or long term information generated from previous processing, drones, or satellites. In the context of Industry 4.0, this enables the interoperability of different agricultural systems and allows information transparency.
FieldSAFE: Dataset for Obstacle Detection in Agriculture
Sep 11, 2017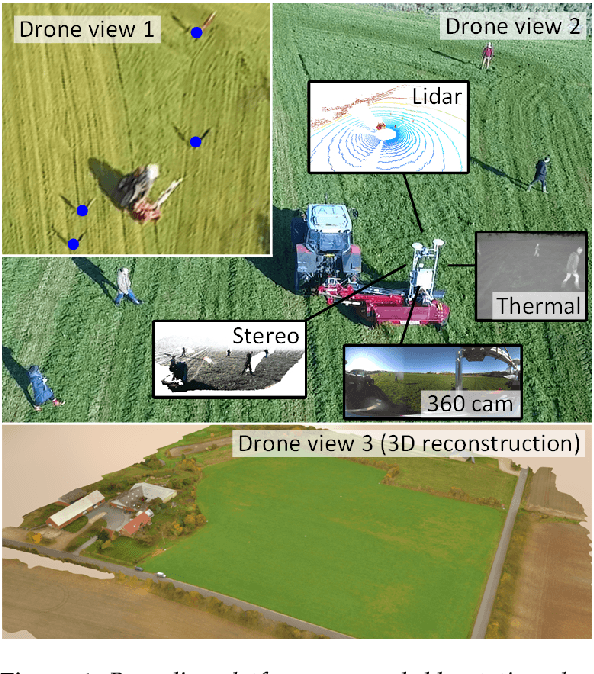
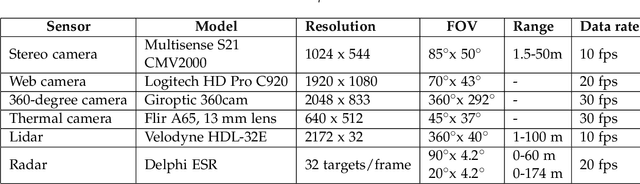
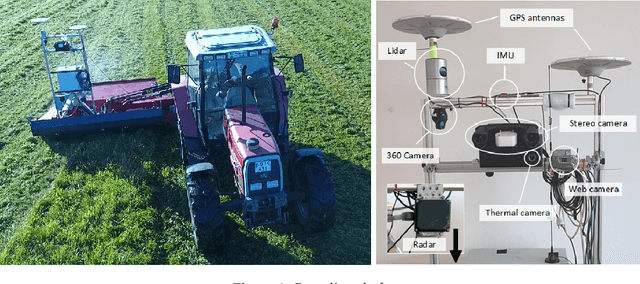

In this paper, we present a novel multi-modal dataset for obstacle detection in agriculture. The dataset comprises approximately 2 hours of raw sensor data from a tractor-mounted sensor system in a grass mowing scenario in Denmark, October 2016. Sensing modalities include stereo camera, thermal camera, web camera, 360-degree camera, lidar, and radar, while precise localization is available from fused IMU and GNSS. Both static and moving obstacles are present including humans, mannequin dolls, rocks, barrels, buildings, vehicles, and vegetation. All obstacles have ground truth object labels and geographic coordinates.
* Submitted to special issue of MDPI Sensors: Sensors in Agriculture
Towards a DSL for Perception-Based Safety Systems
Mar 07, 2016
This paper is an extension to an early presented programming language, called a domain specific language. This paper extends the proposed concept with new sensors and behaviours to address real-life situations. The functionality was tested in lab experiments, and an extension to the earlier concepts is proposed.