 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGround vehicle mapping of fields using LiDAR to enable prediction of crop biomass
May 03, 2018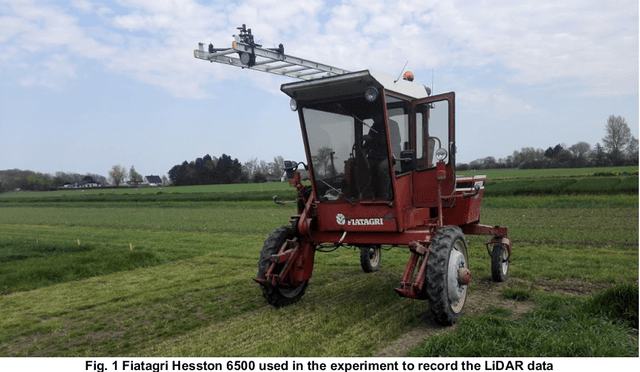
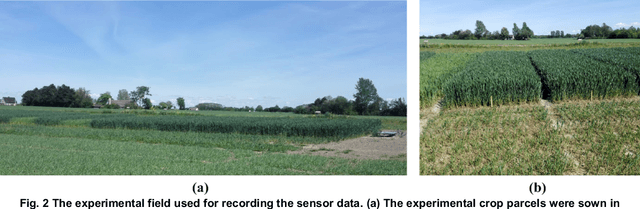
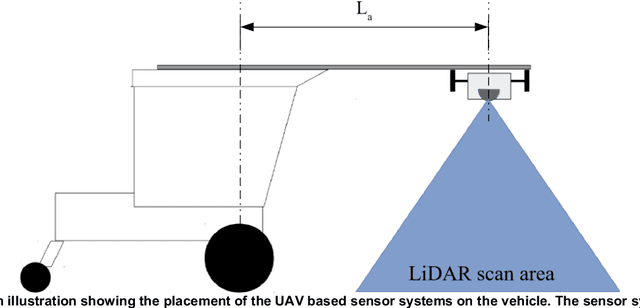
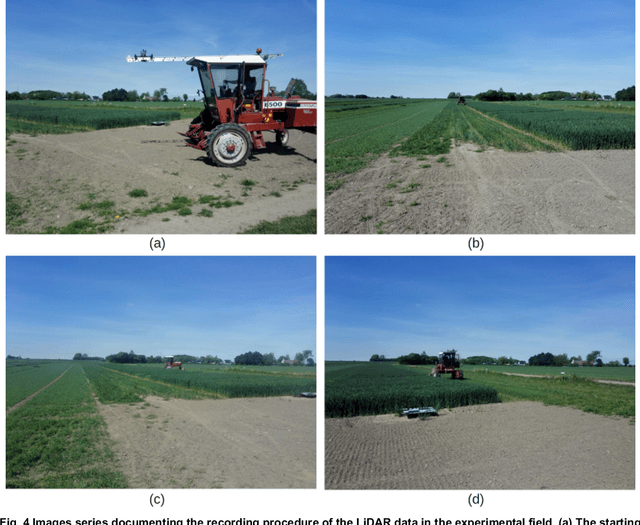
Mapping field environments into point clouds using a 3D LIDAR has the ability to become a new approach for online estimation of crop biomass in the field. The estimation of crop biomass in agriculture is expected to be closely correlated to canopy heights. The work presented in this paper contributes to the mapping and textual analysis of agricultural fields. Crop and environmental state information can be used to tailor treatments to the specific site. This paper presents the current results with our ground vehicle LiDAR mapping systems for broad acre crop fields. The proposed vehicle system and method facilitates LiDAR recordings in an experimental winter wheat field. LiDAR data are combined with data from Global Navigation Satellite System (GNSS) and Inertial Measurement Unit (IMU) sensors to conduct environment mapping for point clouds. The sensory data from the vehicle are recorded, mapped, and analyzed using the functionalities of the Robot Operating System (ROS) and the Point Cloud Library (PCL). In this experiment winter wheat (Triticum aestivum L.) in field plots, was mapped using 3D point clouds with a point density on the centimeter level. The purpose of the experiment was to create 3D LiDAR point-clouds of the field plots enabling canopy volume and textural analysis to discriminate different crop treatments. Estimated crop volumes ranging from 3500-6200 (m3) per hectare are correlated to the manually collected samples of cut biomass extracted from the experimental field.
FieldSAFE: Dataset for Obstacle Detection in Agriculture
Sep 11, 2017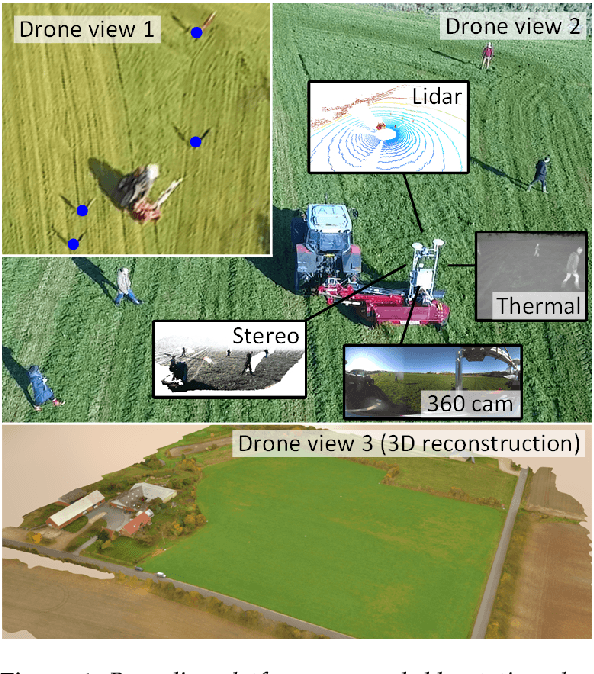
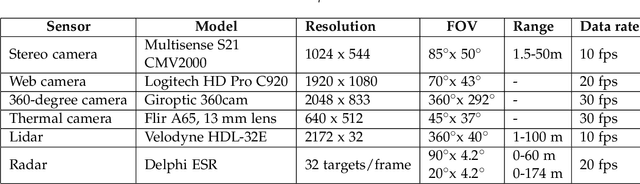
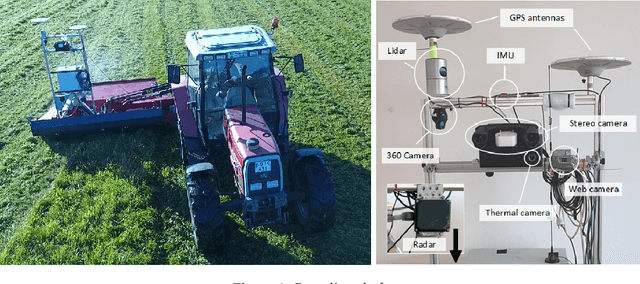

In this paper, we present a novel multi-modal dataset for obstacle detection in agriculture. The dataset comprises approximately 2 hours of raw sensor data from a tractor-mounted sensor system in a grass mowing scenario in Denmark, October 2016. Sensing modalities include stereo camera, thermal camera, web camera, 360-degree camera, lidar, and radar, while precise localization is available from fused IMU and GNSS. Both static and moving obstacles are present including humans, mannequin dolls, rocks, barrels, buildings, vehicles, and vegetation. All obstacles have ground truth object labels and geographic coordinates.
* Submitted to special issue of MDPI Sensors: Sensors in Agriculture