 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Novel Dataset for Evaluating and Alleviating Domain Shift for Human Detection in Agricultural Fields
Sep 27, 2022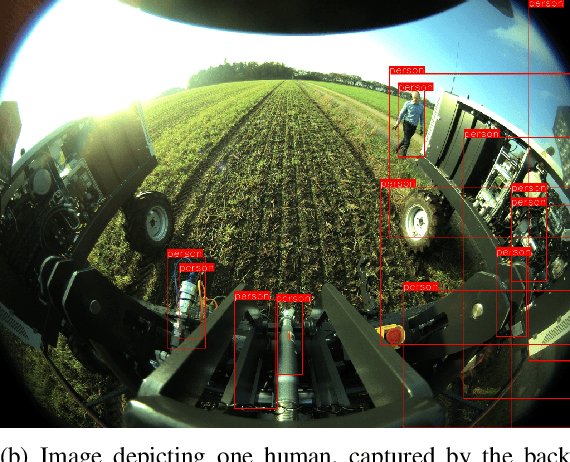
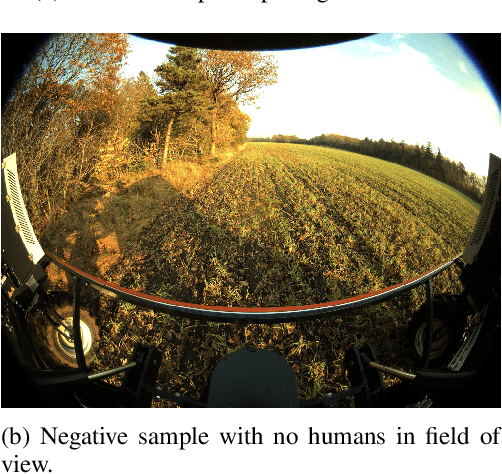
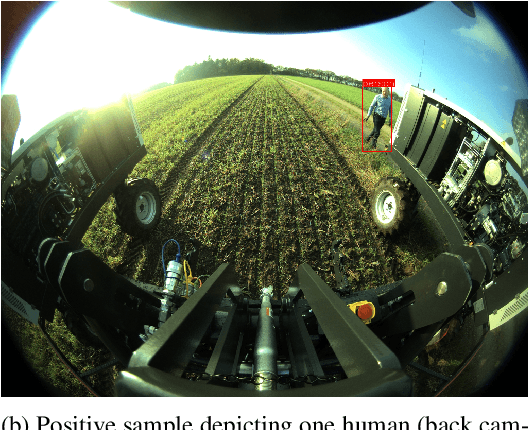
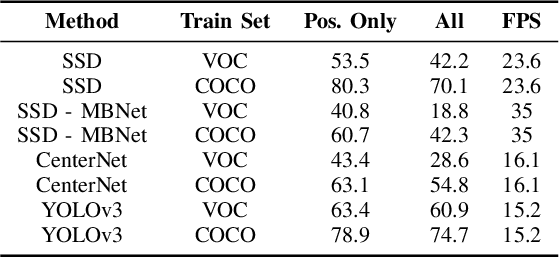
In this paper we evaluate the impact of domain shift on human detection models trained on well known object detection datasets when deployed on data outside the distribution of the training set, as well as propose methods to alleviate such phenomena based on the available annotations from the target domain. Specifically, we introduce the OpenDR Humans in Field dataset, collected in the context of agricultural robotics applications, using the Robotti platform, allowing for quantitatively measuring the impact of domain shift in such applications. Furthermore, we examine the importance of manual annotation by evaluating three distinct scenarios concerning the training data: a) only negative samples, i.e., no depicted humans, b) only positive samples, i.e., only images which contain humans, and c) both negative and positive samples. Our results indicate that good performance can be achieved even when using only negative samples, if additional consideration is given to the training process. We also find that positive samples increase performance especially in terms of better localization. The dataset is publicly available for download at https://github.com/opendr-eu/datasets.
FieldSAFE: Dataset for Obstacle Detection in Agriculture
Sep 11, 2017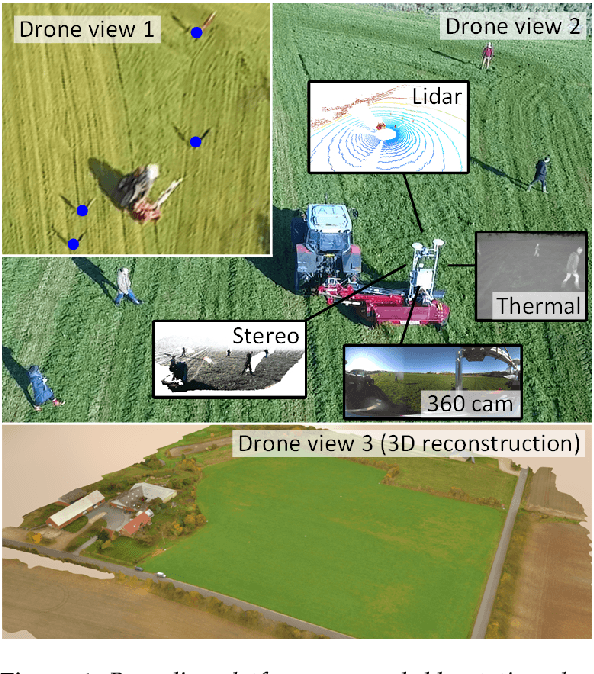
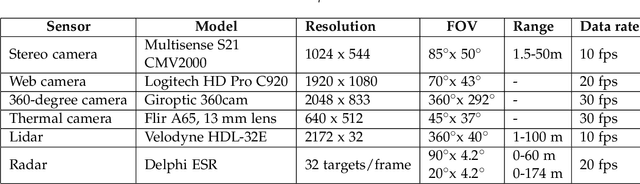
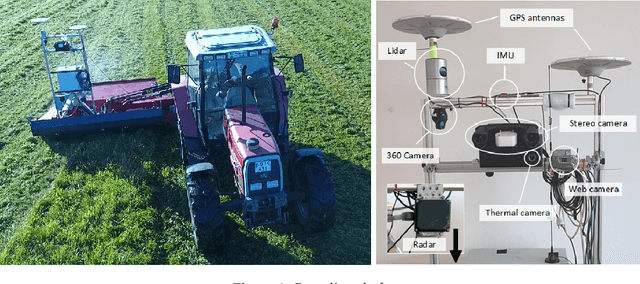

In this paper, we present a novel multi-modal dataset for obstacle detection in agriculture. The dataset comprises approximately 2 hours of raw sensor data from a tractor-mounted sensor system in a grass mowing scenario in Denmark, October 2016. Sensing modalities include stereo camera, thermal camera, web camera, 360-degree camera, lidar, and radar, while precise localization is available from fused IMU and GNSS. Both static and moving obstacles are present including humans, mannequin dolls, rocks, barrels, buildings, vehicles, and vegetation. All obstacles have ground truth object labels and geographic coordinates.
* Submitted to special issue of MDPI Sensors: Sensors in Agriculture