 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Declarative Safety Rules for Perception Specification Architectures
Paper and Code
Jan 12, 2016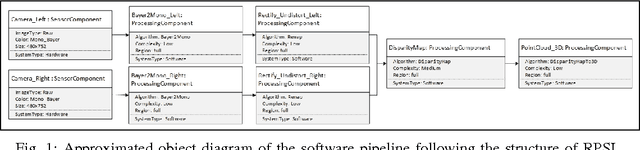
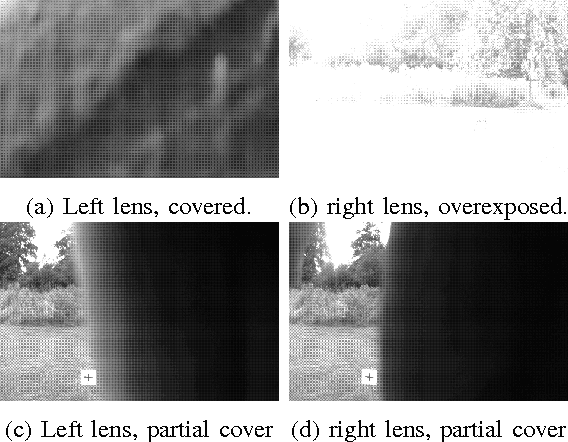
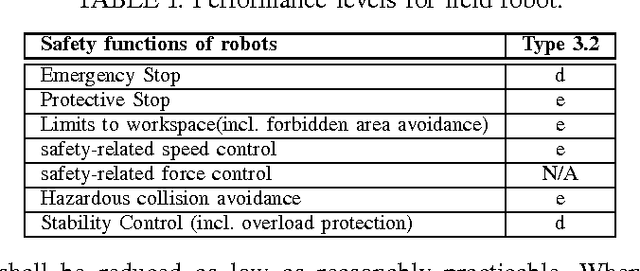
Agriculture has a high number of fatalities compared to other blue collar fields, additionally population decreasing in rural areas is resulting in decreased work force. These issues have resulted in increased focus on improving efficiency of and introducing autonomy in agriculture. Field robots are an increasingly promising branch of robotics targeted at full automation in agriculture. The safety aspect however is rely addressed in connection with safety standards, which limits the real-world applicability. In this paper we present an analysis of a vision pipeline in connection with functional-safety standards, in order to propose solutions for how to ascertain that the system operates as required. Based on the analysis we demonstrate a simple mechanism for verifying that a vision pipeline is functioning correctly, thus improving the safety in the overall system.