 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnergy-Aware Planning-Scheduling for Autonomous Aerial Robots
Jul 22, 2022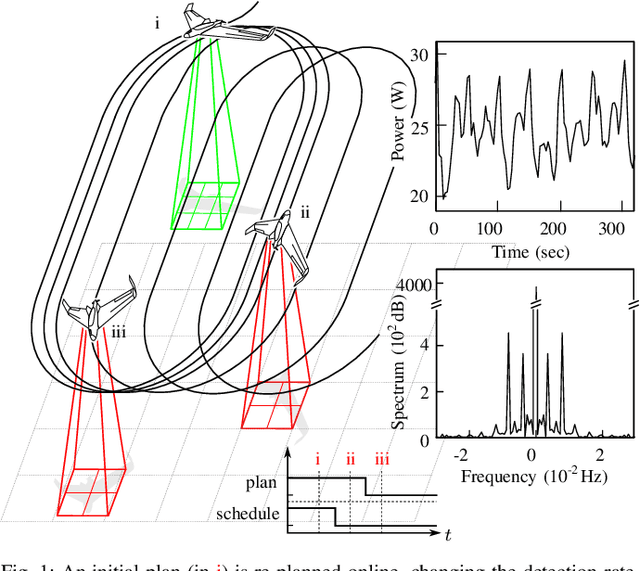
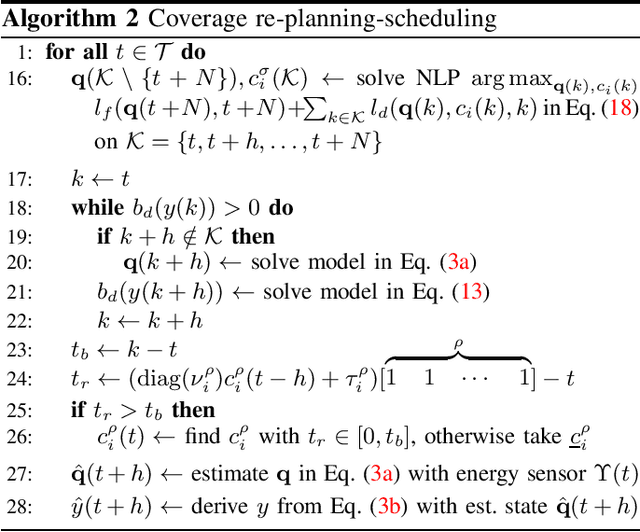
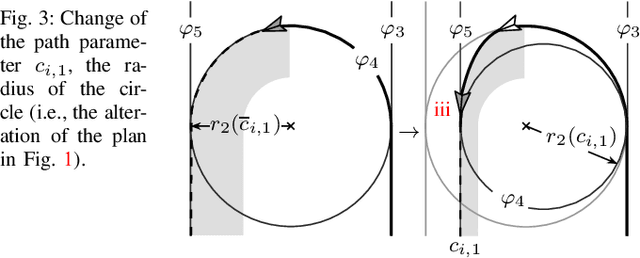
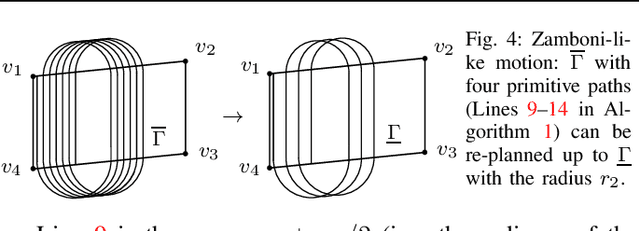
In this paper, we present an online planning-scheduling approach for battery-powered autonomous aerial robots. The approach consists of simultaneously planning a coverage path and scheduling onboard computational tasks. We further derive a novel variable coverage motion robust to airborne constraints and an empirically motivated energy model. The model includes the energy contribution of the schedule based on an automatic computational energy modeling tool. Our experiments show how an initial flight plan is adjusted online as a function of the available battery, accounting for uncertainty. Our approach remedies possible in-flight failure in case of unexpected battery drops, e.g., due to adverse atmospheric conditions, and increases the overall fault tolerance.
A Public Image Database for Benchmark of Plant Seedling Classification Algorithms
Nov 15, 2017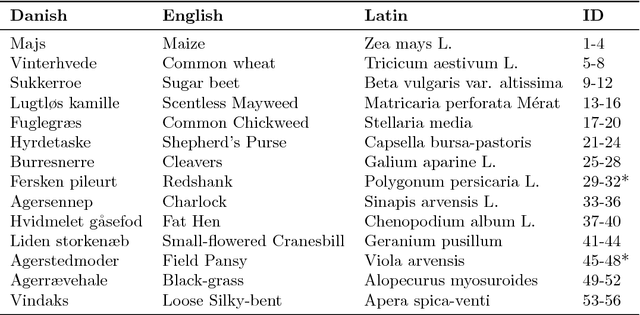
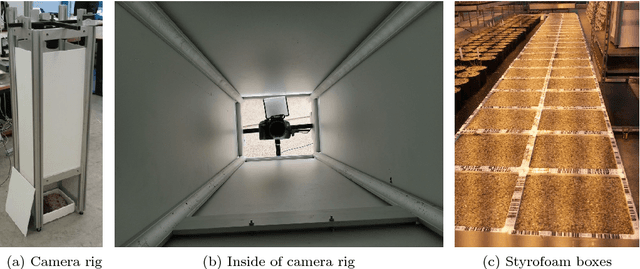
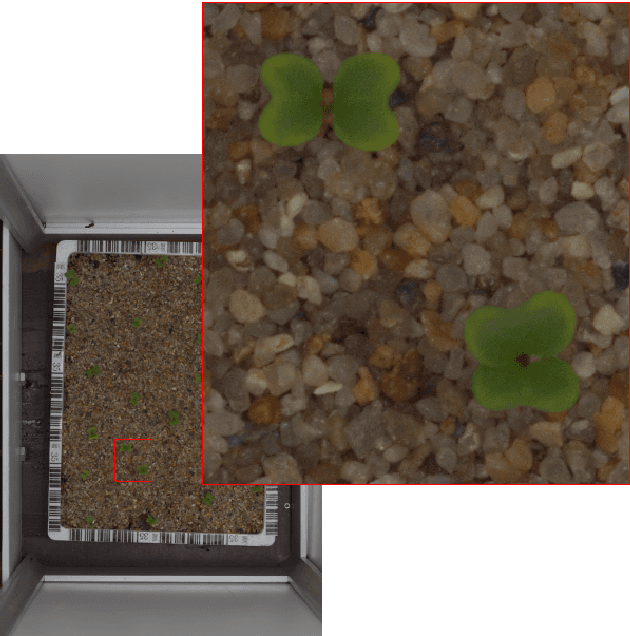
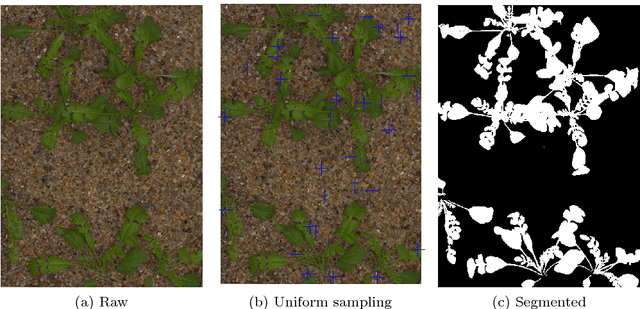
A database of images of approximately 960 unique plants belonging to 12 species at several growth stages is made publicly available. It comprises annotated RGB images with a physical resolution of roughly 10 pixels per mm. To standardise the evaluation of classification results obtained with the database, a benchmark based on $f_{1}$ scores is proposed. The dataset is available at https://vision.eng.au.dk/plant-seedlings-dataset