 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRB5 Low-Cost Explorer: Implementing Autonomous Long-Term Exploration on Low-Cost Robotic Hardware
Feb 14, 2024

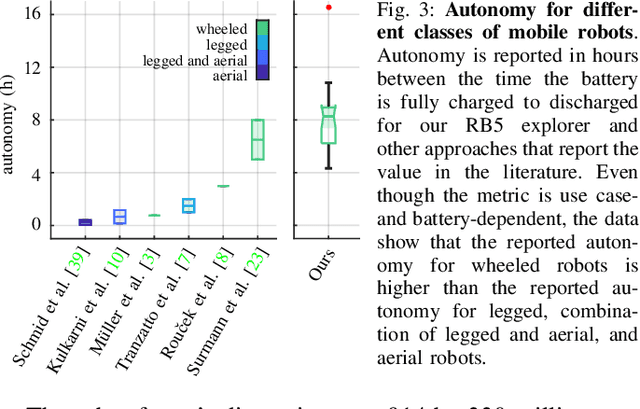

This systems paper presents the implementation and design of RB5, a wheeled robot for autonomous long-term exploration with fewer and cheaper sensors. Requiring just an RGB-D camera and low-power computing hardware, the system consists of an experimental platform with rocker-bogie suspension. It operates in unknown and GPS-denied environments and on indoor and outdoor terrains. The exploration consists of a methodology that extends frontier- and sampling-based exploration with a path-following vector field and a state-of-the-art SLAM algorithm. The methodology allows the robot to explore its surroundings at lower update frequencies, enabling the use of lower-performing and lower-cost hardware while still retaining good autonomous performance. The approach further consists of a methodology to interact with a remotely located human operator based on an inexpensive long-range and low-power communication technology from the internet-of-things domain (i.e., LoRa) and a customized communication protocol. The results and the feasibility analysis show the possible applications and limitations of the approach.
Energy-Aware Ergodic Search: Continuous Exploration for Multi-Agent Systems with Battery Constraints
Oct 14, 2023

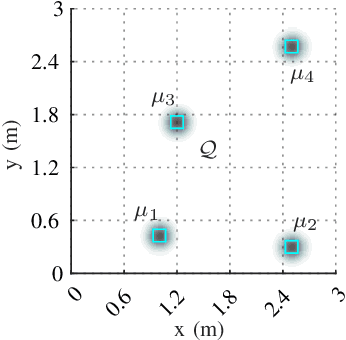

Autonomous exploration without interruption is important in scenarios such as search and rescue and precision agriculture, where consistent presence is needed to detect events over large areas. Ergodic search already derives continuous coverage trajectories in these scenarios so that a robot spends more time in areas with high information density. However, existing literature on ergodic search does not consider the robot's energy constraints, limiting how long a robot can explore. In fact, if the robots are battery-powered, it is physically not possible to continuously explore on a single battery charge. Our paper tackles this challenge by integrating ergodic search methods with energy-aware coverage. We trade off battery usage and coverage quality, maintaining uninterrupted exploration of a given space by at least one agent. Our approach derives an abstract battery model for future state-of-charge estimation and extends canonical ergodic search to ergodic search under battery constraints. Empirical data from simulations and real-world experiments demonstrate the effectiveness of our energy-aware ergodic search, which ensures continuous and uninterrupted exploration and guarantees spatial coverage.
Energy-Aware Planning-Scheduling for Autonomous Aerial Robots
Jul 22, 2022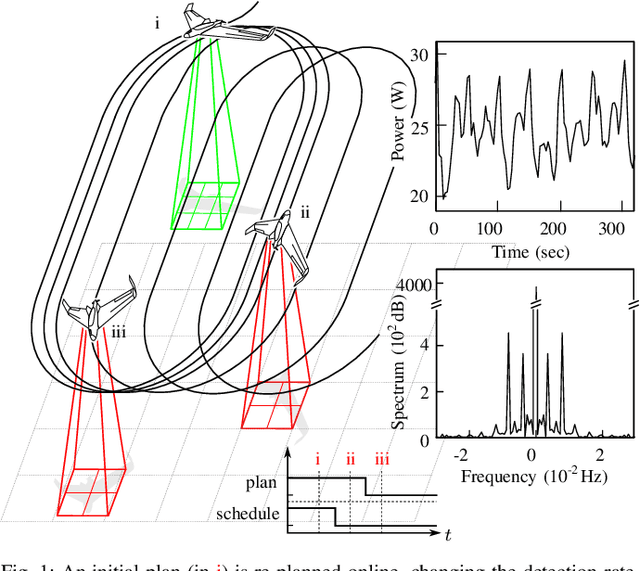
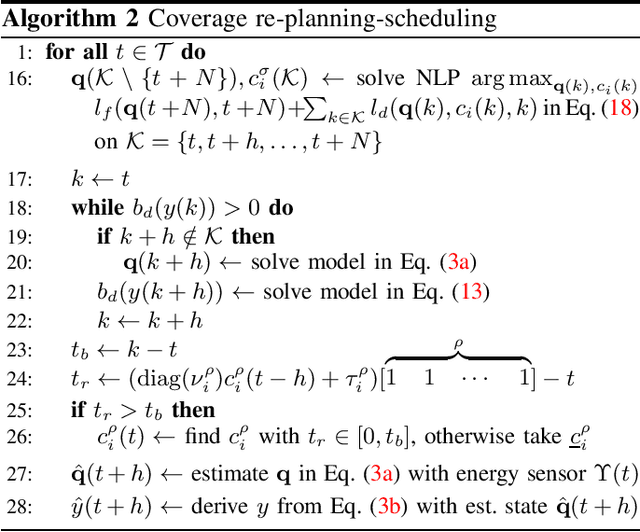
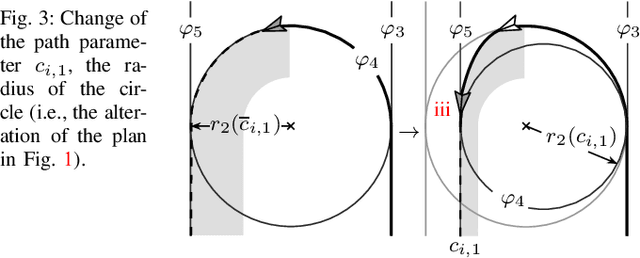
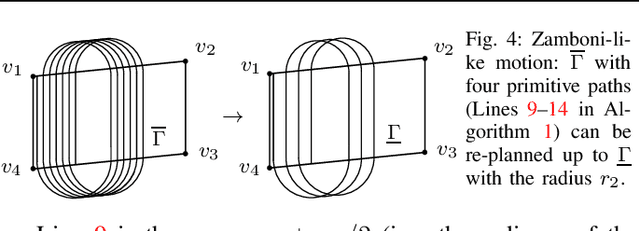
In this paper, we present an online planning-scheduling approach for battery-powered autonomous aerial robots. The approach consists of simultaneously planning a coverage path and scheduling onboard computational tasks. We further derive a novel variable coverage motion robust to airborne constraints and an empirically motivated energy model. The model includes the energy contribution of the schedule based on an automatic computational energy modeling tool. Our experiments show how an initial flight plan is adjusted online as a function of the available battery, accounting for uncertainty. Our approach remedies possible in-flight failure in case of unexpected battery drops, e.g., due to adverse atmospheric conditions, and increases the overall fault tolerance.