 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIndustry 4.0 Asset Administration Shell (AAS): Interoperable Skill-Based Service-Robots
Aug 02, 2022
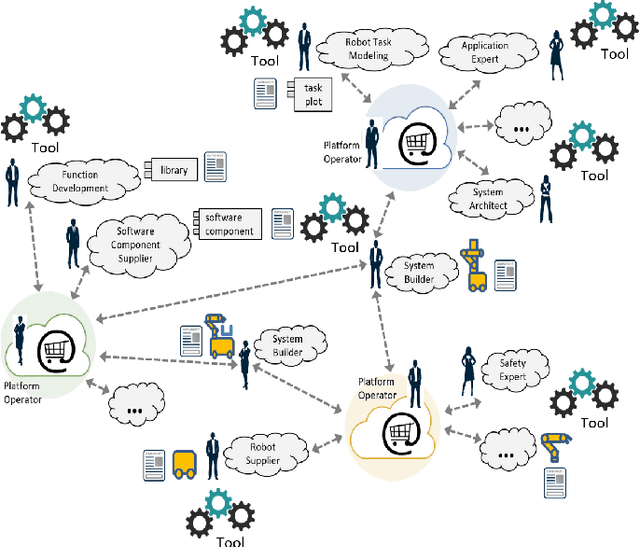
This paper describes our use of Industry 4.0 Asset Administration Shells (AASs) in the context of service robots. We use AASs with software components of service robots and with complete service robot systems. The AAS for a software component serves as a standardized digital data sheet. It helps sysem builders at design time in finding and selecting software components that match system-level requirements of the systems to be built. The AAS for a system comprises a data sheet for the system and furthermore collects at runtime operational data and it allows for skill-level commanding of the service robot. AASs are generated and filled as part of our model-driven development and composition workflow for service robotics. AASs can serve as a key enabler for a standardized integration and interaction with service robots.
Proceedings of the Sixth International Workshop on Domain-Specific Languages and Models for Robotic Systems (DSLRob 2015)
Jan 20, 2016The Sixth International Workshop on Domain-Specific Languages and Models for Robotic Systems (DSLRob'15) was held September 28, 2015 in Hamburg (Germany), as part of the IROS 2015 conference. The main topics of the workshop were Domain-Specific Languages (DSLs) and Model-driven Software Development (MDSD) for robotics. A domain-specific language is a programming language dedicated to a particular problem domain that offers specific notations and abstractions that increase programmer productivity within that domain. Model-driven software development offers a high-level way for domain users to specify the functionality of their system at the right level of abstraction. DSLs and models have historically been used for programming complex systems. However recently they have garnered interest as a separate field of study. Robotic systems blend hardware and software in a holistic way that intrinsically raises many crosscutting concerns (concurrency, uncertainty, time constraints, ...), for which reason, traditional general-purpose languages often lead to a poor fit between the language features and the implementation requirements. DSLs and models offer a powerful, systematic way to overcome this problem, enabling the programmer to quickly and precisely implement novel software solutions to complex problems within the robotics domain.
Modeling Non-Functional Application Domain Constraints for Component-Based Robotics Software Systems
Jan 11, 2016
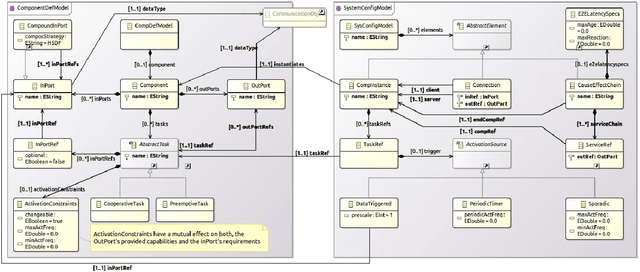
Service robots are complex, heterogeneous, software intensive systems built from components. Recent robotics research trends mainly address isolated capabilities on functional level. Non-functional properties, such as responsiveness or deterministic behavior, are addressed only in isolation (if at all). We argue that handling such non-functional properties on system level is a crucial next step. We claim that precise control over application-specific, dynamic execution and interaction behavior of functional components -- i.e. clear computation and communication semantics on model level without hidden code-defined parts -- is a key ingredient thereto. In this paper, we propose modeling concepts for these semantics, and present a meta-model which (i) enables component developers to implement component functionalities without presuming application-specific, system-level attributes, and (ii) enables system integrators to reason about causal dependencies between components as well as system-level data-flow characteristics. This allows to control data-propagation semantics and system properties such as end-to-end latencies during system integration without breaking component encapsulation.
Proceedings of the Fifth International Workshop on Domain-Specific Languages and Models for Robotic Systems
Nov 26, 2014The Fifth International Workshop on Domain-Specific Languages and Models for Robotic Systems (DSLRob'14) was held in conjunction with the 2014 International Conference on Simulation, Modeling, and Programming for Autonomous Robots (SIMPAR 2014), October 2014 in Bergamo, Italy. The main topics of the workshop were Domain-Specific Languages (DSLs) and Model-driven Software Development (MDSD) for robotics. A domain-specific language is a programming language dedicated to a particular problem domain that offers specific notations and abstractions that increase programmer productivity within that domain. Model-driven software development offers a high-level way for domain users to specify the functionality of their system at the right level of abstraction. DSLs and models have historically been used for programming complex systems. However recently they have garnered interest as a separate field of study. Robotic systems blend hardware and software in a holistic way that intrinsically raises many crosscutting concerns (concurrency, uncertainty, time constraints, ...), for which reason, traditional general-purpose languages often lead to a poor fit between the language features and the implementation requirements. DSLs and models offer a powerful, systematic way to overcome this problem, enabling the programmer to quickly and precisely implement novel software solutions to complex problems within the robotics domain.
Proceedings of the Fourth International Workshop on Domain-Specific Languages and Models for Robotic Systems
Dec 20, 2013The Fourth International Workshop on Domain-Specific Languages and Models for Robotic Systems (DSLRob'13) was held in conjunction with the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2013), November 2013 in Tokyo, Japan. The main topics of the workshop were Domain-Specific Languages (DSLs) and Model-driven Software Development (MDSD) for robotics. A domain-specific language is a programming language dedicated to a particular problem domain that offers specific notations and abstractions that increase programmer productivity within that domain. Model-driven software development offers a high-level way for domain users to specify the functionality of their system at the right level of abstraction. DSLs and models have historically been used for programming complex systems. However recently they have garnered interest as a separate field of study. Robotic systems blend hardware and software in a holistic way that intrinsically raises many crosscutting concerns (concurrency, uncertainty, time constraints, ...), for which reason, traditional general-purpose languages often lead to a poor fit between the language features and the implementation requirements. DSLs and models offer a powerful, systematic way to overcome this problem, enabling the programmer to quickly and precisely implement novel software solutions to complex problems within the robotics domain.
Dealing with Run-Time Variability in Service Robotics: Towards a DSL for Non-Functional Properties
Mar 18, 2013


Service robots act in open-ended, natural environments. Therefore, due to combinatorial explosion of potential situations, it is not possible to foresee all eventualities in advance during robot design. In addition, due to limited resources on a mobile robot, it is not feasible to plan any action on demand. Hence, it is necessary to provide a mechanism to express variability at design-time that can be efficiently resolved on the robot at run-time based on the then available information. In this paper, we introduce a DSL to express run- time variability focused on the execution quality of the robot (in terms of non-functional properties like safety and task efficiency) under changing situations and limited resources. We underpin the applicability of our approach by an example integrated into an overall robotics architecture.
Proceedings of the Third International Workshop on Domain-Specific Languages and Models for Robotic Systems
Feb 20, 2013Proceedings of the Third International Workshop on Domain-Specific Languages and Models for Robotic Systems (DSLRob'12), held at the 2012 International Conference on Simulation, Modeling, and Programming for Autonomous Robots (SIMPAR 2012), November 2012 in Tsukuba, Japan. The main topics of the workshop were Domain-Specific Languages (DSLs) and Model-driven Architecture (MDA) for robotics. A domain-specific language (DSL) is a programming language dedicated to a particular problem domain that offers specific notations and abstractions that increase programmer productivity within that domain. Models-driven architecture (MDA) offers a high-level way for domain users to specify the functionality of their system at the right level of abstraction. DSLs and models have historically been used for programming complex systems. However recently they have garnered interest as a separate field of study. Robotic systems blend hardware and software in a holistic way that intrinsically raises many crosscutting concerns (concurrency, uncertainty, time constraints, ...), for which reason, traditional general-purpose languages often lead to a poor fit between the language features and the implementation requirements. DSLs and models offer a powerful, systematic way to overcome this problem, enabling the programmer to quickly and precisely implement novel software solutions to complex problems within the robotics domain.
Towards Quality of Service and Resource Aware Robotic Systems through Model-Driven Software Development
Sep 24, 2010

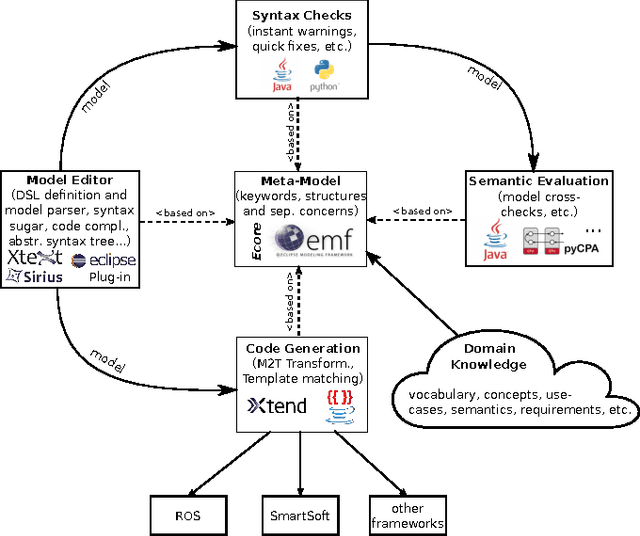
Engineering the software development process in robotics is one of the basic necessities towards industrial-strength service robotic systems. A major challenge is to make the step from code-driven to model-driven systems. This is essential to replace hand-crafted single-unit systems by systems composed out of components with explicitly stated properties. Furthermore, this fosters reuse by separating robotics knowledge from short-cycled implementational technologies. Altogether, this is one but important step towards "able" robots. This paper reports on a model-driven development process for robotic systems. The process consists of a robotics metamodel with first explications of non-functional properties. A model-driven toolchain based on Eclipse provides the model transformation and code generation steps. It also provides design time analysis of resource parameters (e.g. schedulability analysis of realtime tasks) as a first step towards overall resource awareness in the development of integrated robotic systems. The overall approach is underpinned by several real world scenarios.